|
Шарнирно-рычажные механизмы
Шарнирно-рычажными называют механизмы, состоящие из звеньев-рычагов, соединенных низшими кинематическими парами. Такие механизмы могут быть пространственными и плоскими. Простейшие шарнирно-рычажные механизмы состоят из четырех звеньев, соединенных шарнирами: трех подвижных (ведущего и структурной группы, состоящей из двух звеньев) и неподвижного звена – стойки. Подвижное звено, соединенное со стойкой и вращающееся относительно нее, называют кривошипом, а звено, качающееся относительно стойки - коромыслом. Звено, соединяющее подвижные звенья, соединенные кинематическими парами со стойкой, и совершающее сложное движение, называют шатуном; подвижную направляющую – кулисой: звено, движущееся по направляющей, - ползуном.
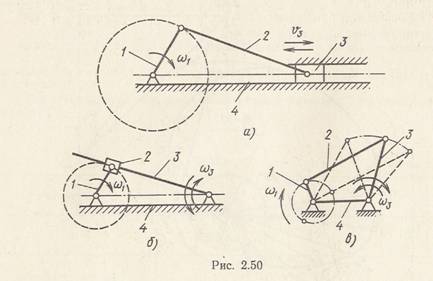
На рис. 2.50 приведены наиболее распространенные плоские четырехзвенные шарнирно-рычажные механизмы: кривошипно-ползунный механизм, применяемый для преобразования вращательного движения кривошипа в поступательное ползуна или поступательного движения ползуна во вращательное кривошипа (рис. 2.50, а); кулисный механизм, служащий для преобразования вращательного движения кривошипа в качательное кулисы или вращательного равномерного кривошипа во вращательное неравномерное кулисы (рис. 2.50, б); шарнирный четырехзвенник, преобразующий вращательное движение кривошипа в качательное или вращательное коромысла (рис. 2.50, в).
Кривошипно-ползунный механизм.
Эти механизмы являются наиболее распространенными; применяются они в машинах и приборах для преобразования поступательного движения во вращательное и наоборот.
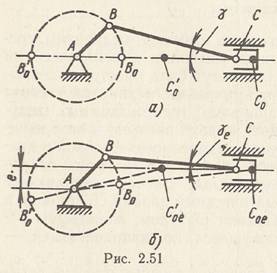
Кривошипно-ползунный механизм, где ось направляющей параллельна или совпадает с линией, соединяющей центры шарниров кривошипа и ползуна, называют аксиальными (рис. 2.51. а), если это условие не выполняется - дезаксиальными(рис. 2.51. б).
Дезаксиальные механизмы при одинаковых с аксиальным размерами кривошипа и шатуна позволяют получить больший ход ползуна и меньшие углы давления при его рабочем ходе.
Кулисный механизм.
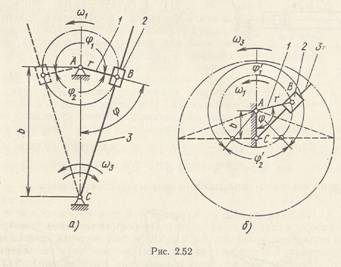
Кулисные механизмы могут быть с качающейся кулисой (рис.2.52. а), предназначенные для преобразования вращательного движения кривошипа в качательное движение кулисы, и с вращающейся кулисой, используемые для преобразования равномерного вращательного движения кривошипа в неравномерное вращение кулисы.
В первом случае длина кривошипа меньше расстояния между центрами шарниров, которыми кривошип и кулиса присоединены к стойке. Во втором – длина кривошипа больше этого расстояния.
Из рис. 2.52. а следует, что коэффициент изменения средней скорости качающейся кулисы
K=t1/t2=φ1/φ2= (pi-arccosλ)/arccosλ, где λ=r/b.
Коэффициент изменения средней скорости вращающейся кулисы (рис.2.52. б)
k´=t1´/t2´=φ1´/φ2´= (pi-arccos(1/λ))/(arccos(1/λ))
Коэффициенты изменения средней скорости ведомого звена у кулисных механизмов выше, чем у других шарнирно-рычажных механизмов.
Угловые скорости и ускорение кулисы (ω3 и ε3) связаны с угловой скоростью кривошипа (ω1) зависимостями
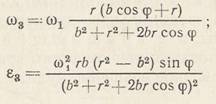
Из зависимостей следует, что при заданных значениях коэффициента изменения средней угловой скорости кулисы и ее максимальной скоростей можно определить отношение r/b=λ и угловую скорость вращения кривошипа ω1.
Кулисные механизмы используют для получения некоторых тригонометрических зависимостей.
Синусные механизмы.
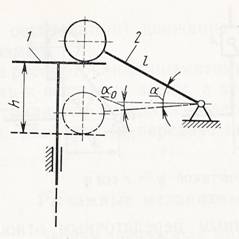
Синусные механизмы применяются в сильфонных манометрах, центробежных тахометрах, электроконтактных датчиках, автоматических и счетно-решающих устройствах.
Тангенсные механизмы.
Применяются для тех же целей, что и синусные. В отличие от последних, в которых точка контакта при работе механизма перемещается по плоской поверхности толкателя, в тангенсных механизмах она скользит по рабочей поверхности рычага.
В тангенсном механизме (рис.2.53 а)
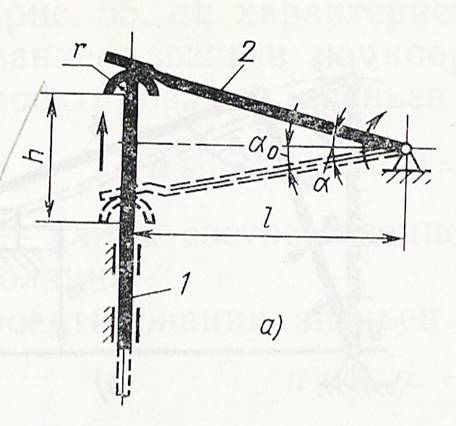
Рис. 2.53 а
функция перемещения определяется следующей зависимостью:

передаточное отношение тангенсного механизма для случая, когда ведущим является рычаг2, а ведомым толкатель 1.

Поводковые механизмы.
Эти механизмы относятся к пространственным механизмам. Их применяют в различных измерительных приборах для преобразования вращательного движения ведущего звена во вращательное движение ведомого звена, которое находится под определенным углом к ведущему звену.
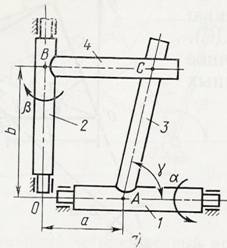
передаточное отношение механизма

передаточное отношение не является величиной постоянной и зависит от ряда параметров механизма. К их числу относятся: угол поворота ведущего поводка α, отношение длин поводков, угол наклона оси ведущего поводка γ.
<Вернуться в начало>
|