2.1. Понятие об управлении. Классификация и требования к системам управления
Теория автоматического управления - наука, которая изучает процессы управления, а также обеспечивает проектирование систем управления в любой области техники.
Под управлением понимают совокупность воздействий, направленных на организацию отдельного процесса или группы процессов для достижения поставленной цели.
Автоматическое управление - управление без непосредственного участия человека. Сочетание же комплекса технических средств и устройств для автоматического управления процессами называется системой автоматического управления (САУ).
Частным случаем автоматического управления является автоматическое регулирование, которое заключается в поддержании или изменении по заданному закону некоторой физической величины в техническом устройстве без непосредственного участия человека. Технические системы для его реализации называются системами автоматического регулирования ( САР ).
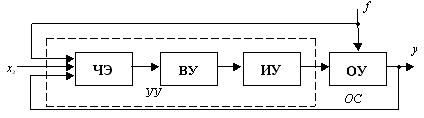
На рис.2.1 представлена блок-схема системы автоматического регулирования.
Рис.2.1. Блок-схема САУ (САР): xз - задающее воздействие ( сигнал задатчика исходной величины); у - выходная величина; f - возмущающее воздействие на объект; ОС- цепь обратной связи, подающая весь или часть выходного сигнала на вход.
Основными элементами САУ являются:
ЧЭ-чувствительный элемент, служащий для измерения на входе САУ воздействий x з , y, f ;
ВУ- вычислительное устройство; оно реализует алгоритм работы САУ.
В простейших случаях это - сравнение, дифференцирование, интегрирование (в более сложных - ЭВМ), а также усиление сигналов с ЧЭ;
ИУ - исполнительное устройство; оно предназначено для непосредственного управления объектом;
ОУ - объект управления.
Весь комплекс устройств, заключенных в пунктирную рамку, называется управляющим устройством (УУ). В состав УУ могут входить: преобразователи, линии и устройства связи, шифраторы и дешифраторы сигналов и т.д.
Существующие САУ (САР) классифицируются по многим признакам следующим образом.
По схемам:
замкнутые ( см. рис. 2.1 ) - имеют цепь ОС.
разомкнутые - не имеют цепи ОС.
По способу регулирования:
по отклонению выходной (регулируемой) величины от заданного значения. Регулирование в них направлено на уменьшение этого отклонения. В этих системах устранено влияние любых возмущений, но в них трудно обеспечить быстродействие;
по возмущению, действующему на систему – в них управляющее воздействие формируется по основному возмущению. В этих сис- темах осуществляется принцип полной или частичной независимости регулируемой величины от основных возмущений. Обладая большим бы- стродействием, они не компенсируют второстепенных возмущений характеристик элементов;
комбинированные сочетают в себе первые и вторые, имея высокую точность и быстродействие.
По виду функции, выражающей закон регулирования:
непрерывного действия и дискретного действия. В непрерывных САР сигнал представляет собой аналогию изменяющейся величине, а в дискретных он квантован по уровню или по времени.
По характеру реакции на постоянные возмущения :
статические - в них установившееся значение регулируемой величины (выходной сигнал) зависит от приложенных воздействий и все- гда имеется статическая остаточная погрешность, пропорциональная величине возмущающего или управляющего воздействий;
астатические - в них установившееся значение регулируемой величины (выходной сигнал) не зависит от приложенных воздействий и статическая погрешность равна нулю.
Практически регулируемая величина находится в пределах некоторой зоны, обусловленной нечувствительностью системы. Однако ошибка регулирования не является функцией управляющего или возмущающего устройства.
По характеру элементов, входящих в САУ:
линейные - в них выходной сигнал прямопропорционален входному;
нелинейные - в них зависимость изменения выходного сигнала от входного не является линейной функцией.
А также:
кибернетические САУ - обладают способностью выбирать наилучший режим работы, приспосабливаясь к изменениям условий работы:
адаптивные САУ - они включают в себя самонастраивающиеся системы, из которых наиболее простыми являются экстремальные (находят такое управляющее воздействие, которое позволяет поддерживать наибольшее или наименьшее значение выходной величины);
к ним также относятся самоорганизующиеся системы, в которых путем изменения структуры системы или ее самообучения добиваются наилучшего управления.
Кроме того, САУ можно подразделить на системы с сосредоточенными и распределенными параметрами, а также на системы с постоянными и переменными во времени параметрами. Строго говоря, все системы являются в той или иной степени системами с переменными во времени параметрами.
К САУ предъявляются следующие основные требования:
1) введение САУ должно повлечь за собой улучшение техникоэкономических показателей машины;
2) САУ должна быть максимально простой;
3) возможность обеспечивать быстрый переход с автоматическо- го управления на ручное;
4) при повреждении система должна сейчас же отключать всю машину во избежание поломки;
5) САУ должна быть достаточно надежна и устойчива в работе;
6) составляющие ее блоки должны быть максимально унифицированы;
7) эксплуатация, ремонт и контроль должны быть просты и удобны.
Рассмотрим теперь принцип действия автоматических систем на примере регулирования температуры воды в проточном водонагревателе
(рис.2.2). Водонагреватель должен обеспечивать подачу воды переменной температуры потребителю вне зависимости от расхода и температу- ры холодной воды (конечно, в пределах, определенных расчетными ха- рактеристиками).
На водонагреватель как объект регулирования, действуют : входные величины- количество подаваемой холодной воды Q x с температурой К х и количество тепла, отдаваемое нагревательным элементом, пропорциональное выделяемой им мощности (или току I ); выходные величины - расход горячей воды Qг с температурой Кг.
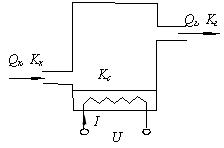
Рис.2.2. Блок-схема проточного электрического водонагревателя
По нижней трубе в водонагреватель поступает холодная вода, которая нагревается проходящим через нагревательный элемент электрическим током и удаляется по верхней трубе. Очевидно, что количество поступающей холодной воды равно количеству уходящей горячей воды. При этом температура холодной воды не является постоянной, а температура горячей должна быть постоянной в определенных пределах.
Если количество поступающей воды и ее температура не изменяются, то выходные величины также не изменяются. Такой режим работы называется установившимся режимом. В этом случае никакого регулирования не нужно и достаточно один раз настроить водонагреватель. На практике же такого не происходит. Изменение количества поступающей холодной воды при одной и той же силе тока ( т.е. температуре) в водонагревательном элементе будет приводить к изменению количества выходящей из водонагревателя воды и ее температуры, т.е. количество выходящей воды и ее температура будут изменяться во времени, или, как говорят, будут функциями времени. А процесс перехода от одного установившегося режима к другому будет называться переходным режимом (или процессом). В результате, если температура горячей воды изменилась (повысилась или понизилась), то она не соответствует требуемой величине. Чтобы привести величину температуры горячей воды к требуемому значению, мы должны каким-то образом изменить силу тока в нагревательном элементе.
При регулировании нужно знать, как связаны между собой входные и выходные параметры всей системы и ее отдельных элементов в установившемся и переходном режимах.
Связь между входными и выходными величинами в установившемся режиме называется статической характеристикой элемента или системы, а эта же связь в переходном режиме называется динамической характеристикой.
В зависимости от вида статических характеристик элементы систем автоматики и все системы в целом делятся на линейные и нелинейные. Если мы примем за входную величину х(t) , а за выходную - у(t) , то статическая линейная характеристика будет определена следующим выражением:
y ( t ) = kx ( t ),
где к - коэффициент пропорциональности,
Все остальные зависимости будут относится к нелинейным.
При изучении процессов в САР следует учитывать следующие понятия, характеризующие их работу.
Устойчивость системы - это свойство системы возвращаться в установившееся состояние после того, как на нее подействовало возму- щение и она была выведена из этого состояния.
Качество процесса регулирования - это параметр, который показывает насколько процесс регулирования близок к желаемому. Количественно качество процесса регулирования определяется критериями качества, которые выбираются в соответствии с целью регулирования.
Точность регулирования - это параметр, который характери- зуется погрешностью системы в установившемся режиме - величиной отклонения выходной величины от требуемого значения.
2.2. Понятие о регулировании. Регуляторы и их типы
Систему автоматического регулирования можно разделить на две основные части - объект регулирования (регулируемый объект) и регуля- тор. Объект регулирования - устройство, совокупность машин и т.п., выполняющих некоторый производственный процесс (технологический, энергетический, транспортный), параметры которого должны находится в заданных пределах. Режимы работы объектов регулирования поддерживаются с помощью автоматических регуляторов. Очевидно, что регулируемые объекты могут быть весьма разнообразны по своему назначению, принципу действия и конструкции.
С точки зрения теории автоматического регулирования нас интере- суют только те свойства объекта регулирования и регулятора, которые оказывают существенное влияние на работу всей системы.
Укажем на следующие свойства объектов регулирования, которые в полной мере присущи только им. Это - ёмкость, самовыравнивание, запаздывание.
Емкость объекта (аккумулирующая способность)- способность объекта накапливать вещество или энергию. Чем меньше емкость объек- та, тем больше скорость изменения регулируемой величины при наруше- нии равновесия между притоком и расходом вещества или энергии. Очевидно, что чем больше емкость объекта, тем легче осуществлять процесс регулирования, тем оно устойчивее. Мерой ёмкости системы, устройства, элемента является его постоянная времени Т , которая показывает, за какое время выходная величина изменится от начального до нового ус-тановившегося значения, если бы это изменение происходило со скоростью постоянной и максимальной для данного переходного процесса.
Самовыравнивание – свойство регулируемого объекта без участия регулятора самостоятельно при ступенчатом изменении входной величины изменять регулируемую величину до нового значения асимптотически. В качестве примера можно привести бак, в который сверху наливается вода, а снизу она свободно вытекает через отверстие. Если скачкообразно увеличить поступление воды, то ее уровень в баке будет увеличиваться до тех пор, пока в результате его повышения за счет увеличения давления на выходе количество выливающейся воды не сравнится с количеством поступающей. После этого уровень воды в баке будет оставаться постоянным.
Если же воду из бака удалять с помощью насоса с постоянной скоростью (расходом), то объект не будет иметь самовыравнивания. В том случае при скачкообразном изменении притока воды ее уровень будет постоянно возрастать, а расход (количество откачиваемой воды) оставаться постоянным.
Объекты с самовыравниванием называют статическими или устойчивыми, а без самовыравнивания - астатическими или нейтральными.
Запаздывание - временная характеристика, определяющая свойство объекта передавать воздействие от входа к выходу с отставанием по времени. Запаздывание бывает двух видов. Чистое запаздывание - время прохождения воздействием расстояния от регулирующего органа, расположенного на входе объекта, до места, где установлен датчик. Емкостное запаздывание – запаздывание, которое зависит от емкости регулируемого объекта. В сумме эти два вида запаздывания дают полное за-паздывание. Чем больше полное запаздывание, тем труднее регулировать процесс.
Второй основной частью системы регулирования (после объекта регулирования) является регулятор. На входе его находится чувствительный элемент, а на выходе - регулирующий орган объекта регулирования.
В зависимости от структуры (наличия или отсутствия усилителя в регуляторе) регуляторы бывают двух типов - прямого и непрямого действия. Регулятор, в котором чувствительный элемент развивает при откло- нении регулируемого параметра от заданного значения усилие, которое достаточно для перемещения регулирующего органа и подключен непосредственно к нему, называется регулятором прямого действия. Примером его может служить хорошо известный регулятор уровня воды с поплавком. Когда уровень воды в баке достигает определенной величины, поплавок перекрывает ей доступ в бак, всплывая и нажимая на клапан.
Эти регуляторы просты по конструкции и широко применяются в тех случаях, когда усилие для перемещения регулирующего органа невелико. Если же между чувствительным элементом и регулирующим органом есть усилитель, то это будет регулятор непрямого действия.
Скажем теперь несколько слов о том, что такое обратная связь (ОС). Обратная связь обеспечивает подачу на вход регулятора часть или всю величину выходного сигнала. Благодаря наличию обратной связи, положение регулирующего органа определяется не только чувствительным элементом, но и отклонением выходной величины от заданного значения.
Обратная связь может быть жесткой, т.е. она действует постоянно и гибкой. Гибкая обратная связь действует только во время процесса регулирования и перестает действовать при подходе системы к положению равновесия. Такая обратная связь называется изодромной. Название произошло от центробежного регулятора, в котором эта связь позволила обеспечить постоянство оборотов машины при разных нагрузках ( по- гречески изос - равный, дромос - бег).
И, наконец, рассмотрим понятия статический и астатический регуляторы. Принято считать, что система автоматического регулирования (САР) по принципу действия будет статической, если установившаяся ошибка при постоянном внешнем воздействии ( статическая ошибка) отлична от нуля, если же эта ошибка равна нулю, то САР будет астатической. Говорить о статизме или астатизме САР можно лишь применительно к какому-либо конкретному внешнему возмущающему или управляющему воздействиям. Одна и та же САР может быть по отношению к одному внешнему воздействию статической и астатической - по отношению к другому.
2.3. Статические характеристики элементов автоматики
Как было указано ранее, вся система автоматического управления или регулирования состоит из отдельных элементов, а каждый эле- мент характеризуется своей статической характеристикой, ее аналитическим выражением или графиком. В полной мере статические свойства элемента автоматики определяются его статической характеристикой (ее аналитическим выражением или графиком), передаточным коэффициентом, чувствительностью и погрешностью. Это его характеристики в установившемся режиме. На рис. 2.3а и рис. 2.3б представлены линейные статические характеристики типа
у = kх, (2.1)
где х - входная величина, у - выходная величина, k - передаточный
коэффициент, k =const.
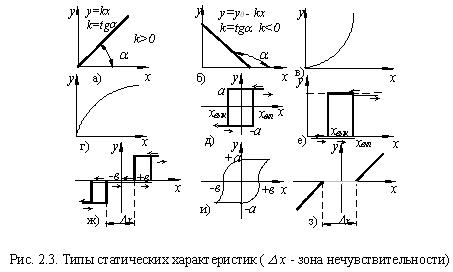
У нелинейных статических характеристик (рис.2.3в и г) переда- точный коэффициент не является постоянной величиной. К нелинейным характеристикам также относятся релейные ( рис. 2.3д, е, ж), характеристики на рис. 2.3ж,з имеют зону нечувствительности, а характеристика рис. 2.3и - явление гистерезиса.
Если элементы САР имеют линейные характеристики, то вся система также будет линейной и описывается линейным дифференциальным уравнением, по которому мы можем определить ее поведение в переходном режиме. Исследование динамики линейных систем значительно проще, чем нелинейных, которые описываются нелинейными дифференциальными уравнениями. Вот почему нелинейные элементы и системы стремятся привести к линейным. Процесс приведения нелинейной характеристики к линейной называют линеаризацией.
Рассмотрим вкратце два метода линеаризации: метод осреднения и метод малых отклонений.
Метод осреднения применяют в тех случаях, когда достаточно гладкая характеристика не может быть представлена аналитически. На рис. 2.4 показана такая характеристика.
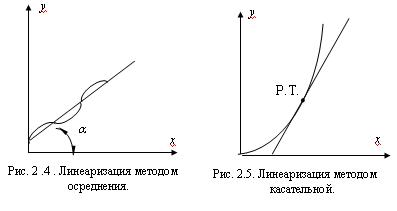
В данном случае статическая характеристика на некотором уча- стке может быть представлена прямой, идущей к оси х под углом a , при этом значения входной величины не выходят за заданные пределы.
Другим методом является метод малых отклонений (метод касательной). Он основан на том предположении, что во время процесса ре- гулирования имеют место весьма малые отклонения всех переменных от установившихся значений. При использовании этого метода криволинейный участок непрерывной статической характеристики заменяют касательной в рабочей точке, т.е. в точке, которая характеризует состояние .
системы и в окрестностях которой происходят эти достаточно малые изменения входной величины (рис. 2.5).
Линеаризация по методу касательной аналитически соответствует разложению в ряд Тэйлора в окрестностях рабочей точки (р.т.) нелинейной характеристики с отбрасыванием членов ряда разложения выше первого порядка малости.
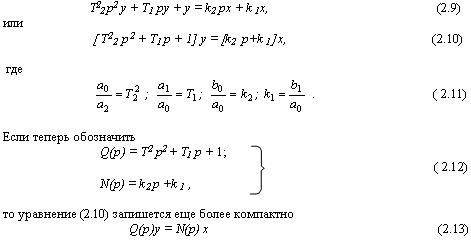
Помимо этого элементы САР имеют такие параметры как абсолютная и относительная чувствительность, абсолютная и относительная погрешность(рис.2.6, 2.7).
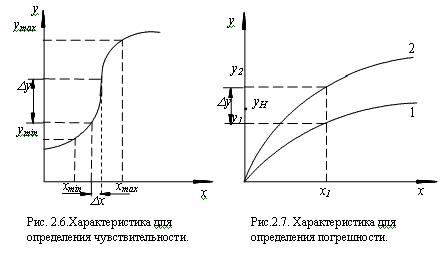
Характеристика на рис.2.6 нелинейная, но имеет участок от x min до x max , на котором ее с достаточной степенью точности можно считать линейной. Этот участок значений входной величины от x min до x max , при которых статическая характеристика линейна, является статическим диапазоном, а отношение D у к D х называется абсолютной чувствительностью элемента.
![]() 2.2
2.2
В практике используют также понятие относительной чувствительности, которая является безразмерной величиной.
![]() 2.3
2.3
где ![]() - относительное приращение выходной величины;
- относительное приращение выходной величины; ![]() - относительное приращение входной величины
- относительное приращение входной величины
На рис. 2.7 представлены две статических характеристики (1 и 2) одного и того же элемента, но находящегося в неодинаковых условиях работы (давление, температура, влажность, вибрации и т.д.).Абсолютная погрешность определяется как разность значений выходной величины при одном и том же значении входной величины
![]() 2.4
2.4
На практике часто пользуются понятием относительной погрешности, которую определяют как отношение абсолютной погрешности к номинальному или максимальному значению выходной величины.
![]() 2.5
2.5
2.4. Динамические характеристики элементов и систем автоматики
Состояние элемента или всей системы САУ может быть определено, если известны входное воздействие и выходная величина.
В автоматике при записи линейных дифференциальных уравнений в левой части записывают выходную величину и ее производные, а остальные члены в правой. Пусть имеем:
![]() 2.6
2.6
Это линейное дифференциальное уравнение второго порядка описывает некоторую САР (или элемент). Разделим теперь ( 2.6 ) на а 2 и освободим- ся от коэффициента при выходной переменной:
![]() 2.7
2.7
Для большей компактности выкладок в автоматике широко ис- пользуется символический метод записи линейных дифференциальных уравнений, в основе которого положено символическое обозначение производных и интеграла
![]() , 2.8
, 2.8
где р - символ дифференцирования.
Сразу нужно заметить, что не следует путать его с комплексной переменной в преобразовании по Лапласу. В отличие от преобразования по Лапласу символический метод только сокращает запись и не содержит никаких приемов, которые облегчили бы решение. С учетом ( 2.8 ) запишем уравнение (2.7)
Эту запись следует рассматривать только как сокращенную запись уравнения (2.6) и не более.

Положим теперь, что система находится в невозбужденном состоянии (нулевые начальные условия) и на ее вход подается единичное ступенчатое воздействие (рис. 2.8 ).
В этом случае реакцией системы будет так называемая передаточная функция.
Если мы теперь запишем в операторной форме исходное уравнение (2.6) , то оно будет иметь вид

Передаточная функция определяется как отношение изображений по Лапласу выходной величины к входной
Не трудно видеть, что запись дифференциального уравнения в операторной форме ( 2.15 ) формально совпадает с записью в символической форме (2.10), в которой символ р обозначает дифференцирование. Такое положение справедливо только при нулевых начальных условиях.
Таким образом,
![]()
Передаточная функция является одним из основных понятий в теории автоматического управления (регулирования) и автоматике.
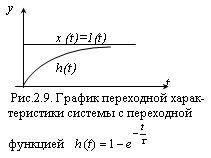
Здесь же следует заметить, что временная реакция системы на единичное ступенчатое воздействие носит название переходной функции и обозначается h ( t ) . На рис. 2.9 показан график одной из таких функций, которую называют переходной характеристикой.
Если же мы подадим на вход системы единичную импульсную функцию или дельта-функцию, удовлетворяющую условиям
то при нулевых начальных условиях реакция системы даст нам так называемую функцию веса системы (звена), которую обозначают w(t)
Полезно отметить, что W( p ), h( t) и связаны между собою следующим образом
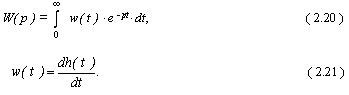
Эти выражения используются при аналитических исследованиях систем автоматики.
Зная переходную или весовую функцию, мы можем найти реакцию на произвольное входное воздействие при нулевых начальных усло- виях с помощью следующих выражений
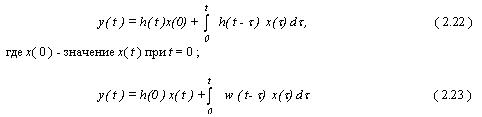
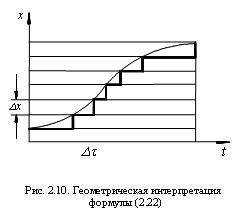
На рис. 2.10 представлена геометрическая интерпретация формулы (2.22).
При произвольном входном сигнале x ( t ) выходной сигнал y ( t ) определен как предел суммы выходных сигналов на ступенчатые воздействия высотой D х = x ? ? D t , на которые можно разложить входной сигнал x ( t ), при D t ® 0. На рис. 2.11 представлена геометрическая интерпретация формулы (2.23) через весовую функцию w ( t ), как предел суммы реакций на импульсы шириной D t при D t -->0.
Здесь необходимо обратить внимание на следующее: слагаемое h (0) x ( t ) в формуле (2.23) на практике равно нулю, т.к. в технике выходной сигнал всегда отстает от входного, т.е. h (0) = 0. Кроме того, в формулах (2.22) и (2.23) в качестве верхнего предела мо- жет стоять ? вместо t , так как при t n t , т.е. при отрицательных значениях аргумента, функции h ( t- t ) и w ( t - t ) будут равны нулю.

Помимо временных ха- рактеристик САУ может быть представлена частотными харак-теристиками.
Частотными характеристиками элемента (звена) или всей САУ называют зависимости, которые связывают входной и выходной сигналы звена (САУ) в установившемся режиме, причем, входной сигнал является гармоническим. В линейной системе выходной сигнал будет также гармоническим.
Произведем формальную замену переменной р на переменную j w в формулах (2.16) и (2.18) и получим:
По частотной передаточной функции САУ (или элемента, звена) строится на комплексной плоскости его амплитудно-фазовая частотная характеристика (АФЧХ). Ампли- тудно-фазовой частотной харак-теристикой (АФЧХ) называется годограф вектора на комплекс- ной плоскости функции W(j w )=A( w ) e j j ( w ) = U( w )+jV( w ) при изменении частоты w от нуля до бесконечности (рис. 2.12) .
АФЧХ строят по точкам, задаваясь отдельными значе- ниями частоты и вычисляя для них значения либо вещественных и мнимых частей U( w ) и V( w ), либо амплитудных и фазовых характеристик А( w ) и j ( w ).

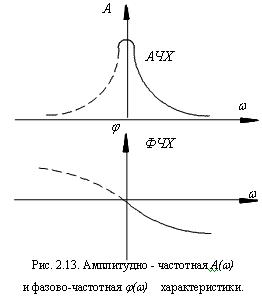
Вместо АФЧХ можно отдельно строить АЧХ - амплитудную частотную характеристику А( w ) и ФЧХ - фазовую частотную характеристику j ( w ), которые представлены на рис. 2.13.
Иногда строят отдельно вещественную U( w ) и мнимую V( w ) характеристики.
Построение частотных характеристик по точкам дело весьма кропотливое и нудное, правда, можно применить для того ЭВМ. Существует также иной метод оценки динамики систем по логарифмическим частотным характеристикам (ЛЧХ).
Построение логарифмической амплитудно-частотной характеристики (ЛАЧХ) производят следующим образом.
Вместо частотной передаточной функции W(j w ) (2.27) исполь- зуют так называемую ЛАЧХ:
L ( w ) = 20 lg e W ( j w ) ? = 20 lg A ( w ) , (2.31)
L( w ) выражается в децибелах (1 децибел = 0,1 бела). Бел пред- ставляет собой логарифмическую единицу, соответствующую десяти- кратному увеличению мощности (так. 1 бел - увеличение в 10 раз, 2 бела - в 100 раз и т.д.). В правой части множитель 20 стоит потому, что А( w ) является отношением не мощностей, а выходной и входной координат ( напряжений , перемещений и т.п.). Один децибел означает изменение амплитуды колебаний в ![]() , т.е. представляет собой весьма малую величину. Здесь же следует отметить, что в связи с логарифмированием e W(j w ) ? ЛАЧХ можно строить для безразмерной W(j w ). Вместе с ЛАЧХ можно построить и ЛФЧХ ( логарифмическую фазовую частотную характеристику).
, т.е. представляет собой весьма малую величину. Здесь же следует отметить, что в связи с логарифмированием e W(j w ) ? ЛАЧХ можно строить для безразмерной W(j w ). Вместе с ЛАЧХ можно построить и ЛФЧХ ( логарифмическую фазовую частотную характеристику).
В большинстве случаев ЛАЧХ и ЛФЧХ можно построить практически без вычислений. Рассмотрим несколько примеров построения.
Прежде всего полезно познакомиться со шкалами частот, используемыми при построении этих характеристик (рис.2.14)
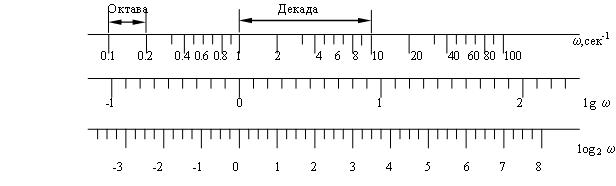
Рис.2.14. Примеры шкал на оси частот.
Пример 1. Для усилителя, коэффициент усиления которого по- стоянен в области частот от 0 до ? .
e W ( j w ) ? = A ( w ) = k ,
где k - постоянный безразмерный коэффициент,
тогда
L( w ) = 20 lg A( w ) = 20 lg k
Эта ЛАЧХ представляет собой горизонтальную прямую, проходящую выше оси частот ( прямая 1 на рис. 2.15) при k > 1
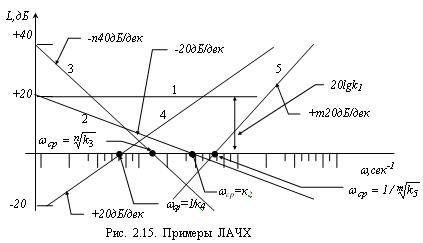
Пример 2. Пусть амплитудно - частотная характеристика
![]()
где k2 - постоянный коэффициент с размерностью ![]() . В этом случае
. В этом случае
![]()
Очевидно, что это прямая линия (прямая 2 на рис. 2.15) с наклоном слева направо, т.е. 20 дБ/дек, где декада (дек) - частотный диапазон, в котором крайние частоты разнятся в 10 раз ( w2/w1= 10 ).
Прямая 2 пересекает ось частот w на частоте, которая называ- ется частотой среза ЛАЧХ. Эта частота среза w ср определяется из условия
![]()
что справедливо при А( w ср ) =1. В нашем случае имеем k2/Wcp, т.е.Wcp=k2.
Пример 3. Положим, что А( w ) = , где к з - постоянный коэффициент с размерностью с - n , тогда
• L( w ) = 20 lg ![]() .
.
• Нетрудно видеть, что это прямая линия ( прямая 3, рис. 2.15) с наклоном - n20 дБ/дек и частотой среза ![]() .
.
• Пример 4. Пусть А( w ) = k ![]() w , где k
w , где k ![]() - постоянный коэффициент с размерностью с . В этом случае
- постоянный коэффициент с размерностью с . В этом случае
L ( w ) = 20 lg k ![]() w .
w .
Для этого случая ЛАЧХ имеет вид прямой ( прямая 4, рис. 2.15) с положительным наклоном 20 дБ/дек и частотой среза ![]() .
.
Пример 5. Положим, что А(?)=k 5 ? m , где k 5 -постоянный коэффициент с размерностью с m , тогда
L (?)=20 lg k 5 ? m .
ЛАЧХ в этом случае является прямой линией (см. линия 5, рис2.15) с положительным наклоном m 20дБ/дек и частотой среза ![]() .
.
Построение ЛФЧХ несколько сложнее и мы рассмотрим это ниже при изучении типовых звеньев.
<Назад> |