Автоматизация сельскохозяйственных машин, как было отмечено в главе 1, является одним из основных путей повышения качества сельскохозяйственной продукции, производительности этих машин и позволяет экономить трудовые ресурсы (высвобождение рабочих), уменьшить (или вообще убрать) долю ручного труда, исключить трудоемкие операции, качественно изменить характер труда человека за счет сокращения утомительных однообразных операций по управлению и регулированию.
При разработке и конструировании средств и систем автоматизации сельскохозяйственных машин необходимо учитывать тяжелые условия работы сельхозмашин: перепады температуры, влажность, запыленность, тряска при движении к месту работы и во время работы, при этом должны соблюдаться следующие условия:
-системы автоматики должны быть надежными и устойчивыми в
работе;
- стоимость систем автоматики не должна быть высокой;
- системы автоматики не должны требовать подстройки при изменении условий работы.
В зависимости от назначения, устройства и системы автоматики для сельскохозяйственных машин можно разделить следующим образом:
- автоматического вождения;
- автоматического регулирования загрузки;
- автоматического управления положением рабочих органов дискретного действия;
- контроля качества работы;
- автоматической настройки на оптимальный режим работы.
При современных тенденциях увеличения скорости движения сельскохозяйственной машины трудно переоценить необходимость авто-матического управления и контроля. Механизатор при ручном управлении машиной совершает до 1000 поворотов рулевого колеса. Если принять, что чистое запаздывание процессом управления составляет около 0,25 с, то при скорости движения около 10 км/ч при незначительной угловой ошибке машина уйдет в сторону почти на 100 мм , что порою значительно больше допустимых отклонений от борозды. Если говорить о движении трактора по полю, то на отрезке 100...250 м отклонение от прямой может доходить до 0,5 м . Колебания же сеялки относительно линии тяги (движение трактора) имеет амплитуду около 0,1 м на отрезках 15...30 м, а перечные колебания имеют амплитуду 0,01...0,06 м на отрезках 4...12 м. С учетом того, что разброс растений от прямой высева на двухметровом отрезке может доходить до 0,03 м , очевидно, что линия, по которой располагаются растения, будет представлять собой достаточно сложное амплитудно-модулированное колебание и в задачу автовож- дения входит наиболее точное копирование этой линии.
Нетрудно видеть, автовождение должно изучаться в комплексе с другими вопросами, затрагивающими широкий спектр проблем (от конструкции машины до посева и уборки урожая), так как кроме указанных выше технологических особенностей следует учитывать климатические условия работы и хранения этих машин (запыленность, перепады температур, влажность, вибрации при работе и др.).
16.1. А втоматическое вождение трактора по копиру и проволоке
Этот метод вождения может быть применен для многих видов полевых работ: обработке почвы, севе, культивации, внесении удобрений, уборке, т.е. в тех случаях, когда машина должна каждый раз проходить по одной и той же траектории.
Первую траекторию (первый гон) прокладывают при ручном управлении трактором, а затем по проложенной борозде всегда движется копир, укрепленный впереди трактора, который подает сигнал в случае отклонения от борозды.
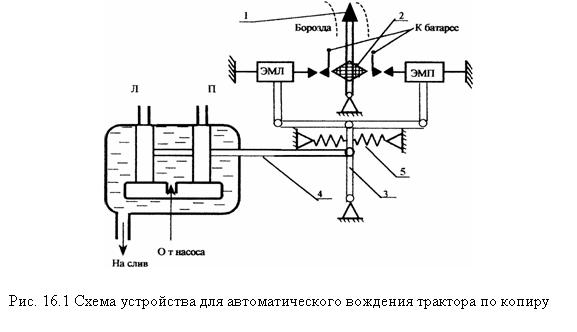
На рис. 16.1 показана схема устройства для автоматического во ждения трактора по контуру.
Принцип действия системы заключается в следующем. При дви жении трактора копир 1 скользит по дну борозды. Если борозда уходит влево, то копир, сдвигаясь влево, замыкает левый контакт контактной группы 2 и на электромагнит ЭМЛ подается напряжение от бортового аккумулятора. Электромагнит ЭМЛ срабатывает и двигает рычаг 3, который в свою очередь перемещает шток 4 золотника влево. При этом открывается трубопровод Л, и масло под давлением поступает на левый гидроцилиндр, который отключает левый фрикцион, заставляя трактор поворачивать влево, что приводит к размыканию левого контакта в контактной группе 2. Далее электромагнит ЭМЛ отключается, а поршни золотника возвращаются в исходное положение пружиной 6. Теперь включены оба фрикциона, и трактор движется прямо. При отклонении копира в правую сторону происходит аналогичная процедура.
Этот способ управления достаточно прост, но имеет недостаток за счет накапливания статической ошибки управления, в результате чего после нескольких проходов направление движения сильно искривляется по отношению к заданному первоначально, что требует постоянной корректировки, кроме того, при наезде копира на возможные препятствия трактор начинает двигаться произвольно.
На рис. 16.2 показана структурная схема автовождения трактора, где х зад - задающее воздействие (борозда); у - выходная (управляемая) величина - направление движения трактора; e - величина (ошибка) рассогласования; А 1 , А 2 - зоны нечувствительности чувствительного элемента и управляющего устройства; х д , х зол , х им - выходные сигналы датчика, золотника, исполнительного механизма (гидроцилиндра); к им , к т – коэффициенты передачи исполнительного механизма (гидроцилиндра) и трактора.
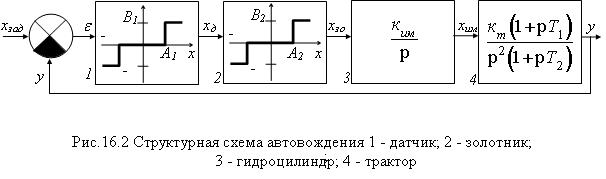
Система может быть представлена такими уравнениями;
где Т 1 и Т 2 - постоянные времени трактора, зависящие от скорости дви жения трактора и расстояния до борозды (копира).
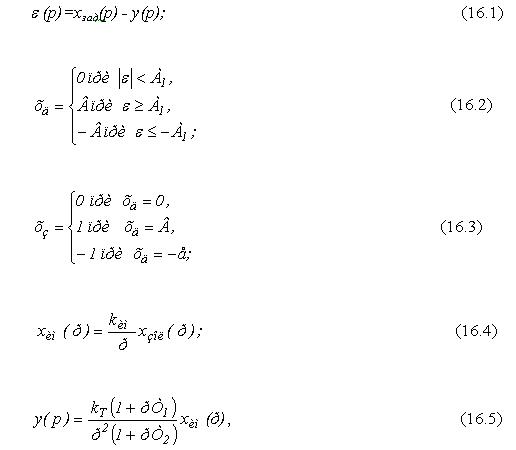
Аналогичным образом работает система автовождения трактора по проволоке (рис. 16.3)
Под почвой прокладывается кабель 1, питающийся током частотой в несколько десятков килогерц. Вокруг провода создается электромагнитное поле, которое задает направление движение.
На тракторе устанавливается датчик электромагнитных колебаний 2, который воспринимает колебания поля, создаваемого в кабеле. Система построена таким образом, что при определенной интенсивности поля (расстоянии датчика от кабеля L ) сигналы на выходах усилителя равны нулю и трактор движется прямо. Если теперь трактор приблизится к проволоке (т.е. L уменьшится), то сигнал с датчика увеличится и на выходе усилителя У появится сигнал, который приведет к срабатыванию электромагнита ЭМЛ и перемещению поршней 3 золотника влево. В результате в трубопровод гидроцилиндра левого фрикциона поступает под давлением масло, левый фрикцион отключается, и трактор начинает по ворачивать влево. При уходе трактора влево от кабеля сигнал уменьшается и срабатывает правый канал схемы. Пружины 4 служат для установки поршней в нейтральное положение.
Кабели укладывают на глубину около 0,7м вдоль гона на расстоянии двойной ширины захвата рабочими органами машины. На концах гона укладывают поперек кабель с током иной частоты для обеспечения поворота трактора для движения в обратном направлении.
16.2 Выравнивание остава комбайна
Прямолинейное движение комбайна может быть автоматизировано указанным выше способом, но, кроме этого при работе на склонах необходимо обеспечивать копирование агрофона жаткой комбайна и горизонтальное положение молотилки. Выполнять эти операции вручную, довольно сложно, т.к. угол наклона поверхности может меняться непрерывно.
Если комбайн не имеет системы автоматического управления остовом (молотилкой), то при движении на поперечных склонах с углами более 8 о перерабатываемая масса смещается на наклонную сторону комбайна, что приводит к увеличению невымолота до 20...80%, повреждаемости зерна до 30% и в отдельных случаях к забиванию молотильных барабанов хлебной массой. С целью выравнивания остова комбайна, предназначенного для работы в холмистой местности, его корпус устанавливают на специальной подвеске (рис.1.6)
При наклоне корпуса комбайна, например, влево маятник 1 (инерционный элемент системы) отклоняется от вертикали также влево, передвигая поршни золотника 2 влево. В результате масло под давлением поступает в силовой гидроцилиндр 3, который поворачивает молотилку 4 относительно опорного бруса 5 до установления её в горизонтальное положение. Маятник 1 при этом занимает вертикальное положение, смещает поршни золотника в первоначальное положение, трубопроводы закрываются и гидроцилиндр останавливается. В этом положении система остается до тех пор, пока не изменится угол наклона поверхности почвы. Демпфирующие элементы 6 служат для исключения ложных срабатываний системы при толчках.
Структурная схема автоматической системы выравнивания остова комбайна аналогична структурной схеме рис. 16.2. Здесь следует счи- тать маятник 1 - блок 1; золотник 2 - блок 2; гидроцилиндр 3 - блок 3; остов комбайна 4 - блок 4, передаточная функция которого может быть принята как передаточная функция в виде  .
.
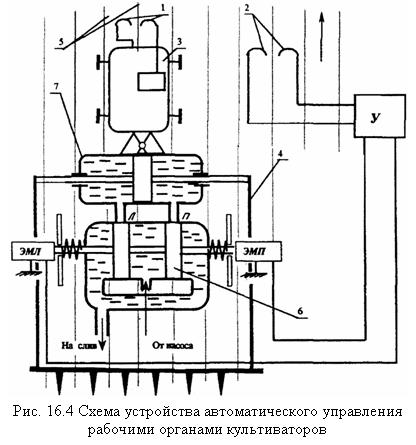
16.3. Автоматическое управление рабочими органами культиваторов
На рис. 16.4 представлена схема устройства автоматического управления рабочими органами культиваторов. В качестве датчиков здесь используются проволочные электроды 1 и 2. Электроды 1 включены в систему автовождения трактора 3, а электроды 2 закреплены на культиваторе на высоте, которая соответствует высоте обрабатываемой сельскохозяйственной культуры.
При отклонении рабочих органов от рядка 5 влево или вправо культурное растение касается правого или левого электрода 2 и замыкает электрическую цепь через себя на землю. Сопротивление растения лежит в пределах от 1 до 25 МОм, что обуславливает очень малую величину тока в цепи. Такой слабый сигнал не может быть напрямую использован, а поэтому он усиливается усилителем У . Усиленный усилителем сигнал поступает на соответствующий электромагнит ЭМП или ЭМЛ (в зависимо- сти от направления отклонения культиватора). Электромагнит перемещает поршни золотника 6, открывая трубопроводы Л или П . Масло под дав- лением поступает в соответствующую часть силового гидроцилиндра 7 и передвигает его поршень, соединенный с рамой культиватора 4 в соответствующую сторону до тех пор, пока растение не перестанет касаться электрода-щупа.
При автоматическом управлении движением лап культиватора практически исключается ошибочное срезание культурных растений, находящихся в рядках, в то время как при ручном управлении при удалении сорняков количество подрезанных культурных растений доходит до 40%.
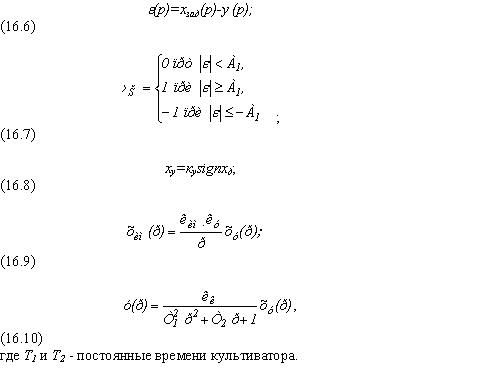
На рис. 16.5 представлена структурная схема устройства автоматического управления рабочими органами культиватора.
Работу системы можно описать следующими уравнениями;
16.4 Автоматическое управление глубиной пахоты
Как было отмечено в главе 1, существует несколько способов управления глубиной вспашки. Среди наиболее распространеных: силовой, высотный и комбинированный, которые доведены до практического применения.
На рис. 1.4 (глава 1) показана схема исполнительного механизма автоматического управления глубиной вспашки высотным способом.
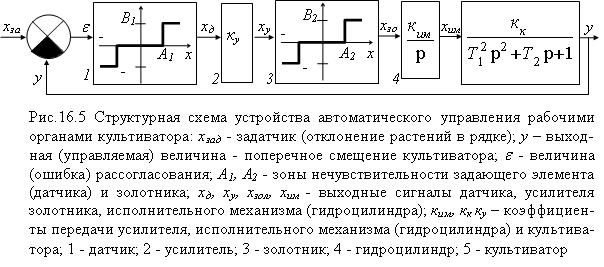
Структурная схема автоматического регулирования глубиной пахоты представлена на рис 16.6.
Устройство автоматического управления глубиной пахоты может быть описано следующими уравнениями:
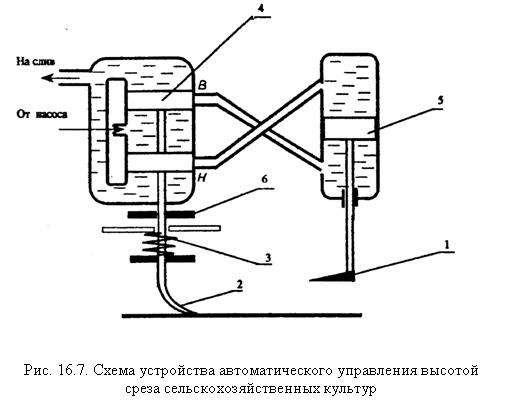
16.5. Автоматическое управление высотой среза
Высота среза определяется расстоянием от поверхности почвы до режущего аппарата (рис. 16.7), это расстояние между копиром 2, скользящим по поверхности почвы, и режущим аппаратом 1. Если высота среза соответствует первоначально заданной (она производится путем установки высоты режущего аппарата над почвой), то трубопроводы В и Н закрыты, а поршень силового гидроцилиндра 5 и жестко связанный с ним аппарат неподвижны.
При изменении рельефа почвы щуп 2, который прижимается к ней пружиной 3, смещает вверх (или вниз) поршни золотника 4. В ре- зультате этого открываются трубопроводы В или Н , и масло под давлением начинает поступать в нижнюю часть (или верхнюю) силового гидроцилиндра 5. Поршень силового цилиндра начнет смещаться вверх (или вниз) вместе с закрепленным на нем режущим аппаратом до заданной высоты. Как только это будет достигнуто, трубопроводы В и Н будут закрыты поршнями золотника. Предохранительное приспособление 6 служит для предотвращения поломки при наезде щупа на препятствие.
16.6 Контроль частоты вращения рабочих органов
Контроль частоты вращения рабочих органов сельскохозяйственных машин (как и отсутствие вращения) используется как косвенный показатель качества функционирования машины в целом или отдельных ее частей.
Контроль частоты вращения рабочих органов основан на подсчете числа электрических импульсов, соответствующих числу оборотов.
Осуществляется это с помощью электроконтактных и бесконтактных датчиков(рис. 16.8).
Кулачок, который укреплен на валу, при вращении замыкает электрические контакты (возможно использование бесконтактного, на- пример, фотоэлектрического или индуктивного датчиков), и на счетчик импульсов ( СИ ) подаются импульсы. Счетчик импульсов подсчитывает количество импульсов (пришедших от датчика за единицу времени) и выдает постоянное напряжение, пропорциональное этому количеству, которое в свою очередь подается на индикатор ( ИНД ) - вольтметр постоянного тока, шкала которого проградуирова- на в об/мин .

16.7 Контроль движения семян в рабочих органах посевных машин
Для контроля движения семян в рабочих органах посевных ма- шин применяются в качестве датчиков электромеханические, фотоэлектрические, акустические и пьезоэлектрические датчики. Но ни один из них не свободен от недостатков. Электромеханические датчики легко повреждаются, забиваются, изменяют характер исходного потока семян. Акустические датчики (микрофоны) преобразуют энергию удара зерна при высеве в сигнал низкой частоты, который далее после усиления используется для информации о процессе высева. Установка этого датчика в сошнике препятствует движению семян и нарушает их распределение. Аналогичная картина наблюдается при установке пьезоэлектрического датчика, хотя здесь снижается уровень помех и повышается чувствительность системы. Наиболее приемлемым является фотоэлектрический датчик, однако для него необходимо применять серьезные меры против запыления (рис. 16.9).
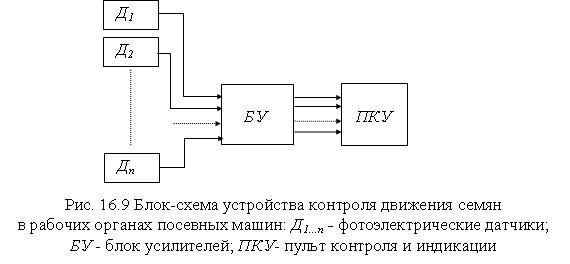
Фотоэлектрические датчики высева ( Д 1...п ) выполняются в герметически закрытом пластмассовом корпусе и помещаются в специальном вырезе семяпровода или сошника сеялки. В корпусе смонтированы фотоэлемент и осветитель. Сигнал от датчика усиливается блоком усилителей ( БУ ) и поступает на пульт контроля и управления ( ПКУ ). Всего схема имеет до восьми каналов контроля. При проходе через семяпровод семя прерывает световой поток. При этом формируется электрический им- пульс, который усиливается усилителем своего канала и попадает на соответствующий индикатор. Схема устроена таким образом, что при отсутствии импульсов, т.е. при забивании семяпровода или отсутствии семян в нем на пульте загорается красная лампочка под номером соответствующего канала, в то время как при нормальном прохождении семян горит зеленая лампочка.
16.8 Контроль потерь зерна при уборке
Одним из основных параметров, характеризующих качество работы уборочной машины, является уровень потерь урожая.
В настоящее время контроль работы зерноуборочного комбайна в этом плане производится с помощью прибора, использующего пьезо-электрические датчики. Этот прибор измеряет величину фактических потерь зерна (в процентах) за молотилкой комбайна. Блок-схема устройства представлена на рис. 16.10.
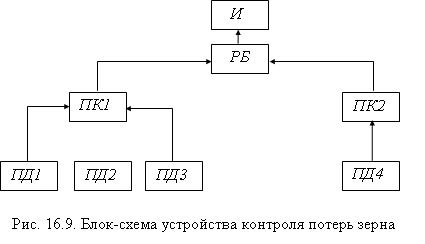
Конструктивно три пьезоэлектрических датчика ( ПД1, ПД2 и ПД3 ) устанавливаются на двух средних клавишах четырехклавишного соломотряса или на второй и четверной клавишах пятиклавишного соломотряса, а также на скатной доске. Пьезоэлектрический датчик ПД4 установлен на дне решетного стана для регистрации количества обмолачи- ваемого комбайном зерна.
При каждом ударе зерна о пьезодатчики последние выдают электрические импульсы. С датчиков ПД1, ПД2 и ПД3 сигналы поступают в блок канала потерь ( ПК1 ), а с ПД4 в блок канала подачи ( ПК2 ). В блоках ПК1 и ПК2 эти сигналы усиливаются и преобразуются в прямоугольные импульсы постоянной длительности и амплитуды, которые поступа- ют на решающий блок ( РБ ), который выдает на индикатор ( И ) сигнал, пропорциональный потерям. Этот сигнал поступает на стрелочный прибор - индикатор. Индикатор дает величину фактических потерь зерна за молотилкой комбайна. Показания могут быть в относительных единицах или процентах.
<Назад> |