|

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ДОНСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ЦЕНТР ДИСТАНЦИОННОГО ОБУЧЕНИЯ
Кафедра «Сервис и техническая эксплуатация автотранспортных средств»
Конструкция, расчет и потребительские свойства автомобилей
ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА АВТОМОБИЛЯ
ТЕОРИЯ И РАСЧЕТ
Учебное пособие
2.4. Примеры расчетов
Пример 1.
Автомобиль движется со скоростью V=25 м/с. Определить амплитудное значение момента, стремящегося повернуть колеса
относительно поворотных стоек. Момент дисбаланса правого и левого колеса одинаковый и равен Мдб=0,1 Нм, радиус колес rк=0,3 м,
длина поворотной цапфы lц=0,1 м. Неуравновешенные массы правого и левого управляемых колес смещены по фазе на 180о.
Определим величину неуравновешенной массы колес из условия, что
Mдб=mg·rk
где m – масса на колесе, создающая дисбаланс.

Амплитуда (наибольшее) значение момента от центробежных сил инерции, стремящегося повернуть колеса относительно
поворотных стоек и нарушающего управляемость автомобиля, определяется при положении сил в горизонтальной плоскости (рис. 13).
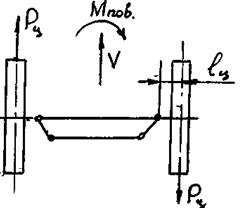
Момент от центробежных сил определим по формуле:
Mпов=2·m·ω2·rk·lц
где ω – угловая частота вращения колеса автомобиля.
где V – скорость движения автомобиля.
Амплитудное значение момента от центробежных сил равно:
Mпов=2·0,034·83,32·0,3·0,1=14,15 Нм
Пример 2.
Автомобиль, имеющий массу m=1400 кг, движется со скоростью V=20 м/с по дуге окружности, радиус которой равен R=110м.
Продольная база автомобиля L=2,4м, расстояние от задней оси до центра масс равно b=1,1м. Найти суммарный стабилизирующий
момент на управляемых колесах, возникающий в результате продольного наклона поворотных стоек на угол ?=2о. Радиус колес равен rk=0,28 м.
Стабилизирующий момент на управляемых колесах возникает в результате действия реактивной силы Rб относительно точки 1
– точки пересечения наклоненной оси поворотной стойки и линии окружности колеса (рис. 14).
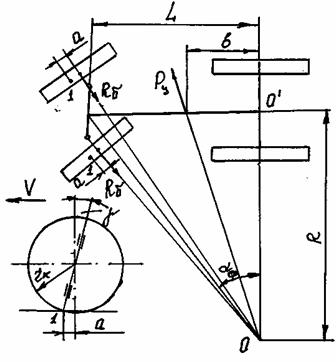
Рис. 14. Схема к расчету стабилизирующего момента на управляемых колесах
Суммарный стабилизирующий момент равен:
Mст=2·Rб·a
где а – плечо действия силы Rб относительно точки 1.
Из условия равновесия автомобиля относительно точки О' (рис. 14) получим соотношение между силой Rб и
центробежной силой Рц:

С учетом поворота колес на угол αср реакция колес Rб будет:
где угол αср= arctg L/R (см. схему на рис. 14).
Учитывая, что центробежная сила инерции Рц = mV2/R, а плечо а действия силы Rб = rk·sinΥ, расчетная формула
для суммарного стабилизирующего момента принимает вид:

Пример 3.
На автомобиль, имеющий массу m=7400 кг и движущийся со скоростью V=16 м/с, действует поперечная боковая сила Рб,
равная 10000 H и приложенная в центре масс автомобиля. Продольная база автомобиля L=3,7 м, расстояние от центра масс до задних
колес b=0,9 м. Определить радиус R дуги окружности, описываемый автомобилем, если его управляемые колеса находятся в нейтральном положении, а коэффициенты
сопротивления уводу передних и задних колес равны соответственно КА=1800 Н/град и КB=4800 Н/град.
Из формулы (16) следует, что при неповернутых управляемых колесах и при наличии уводов колес радиус поворота
автомобиля равен:
где δB - угол увода задних колес;
δА - угол увода передних колес.
Углы увода задних и передних колес равны:
где Рб.з. и Рб.п. - составляющие боковой силы Рб., действующие в точках В и А на заднюю и переднюю оси автомобиля
(см. схему на рис.15).
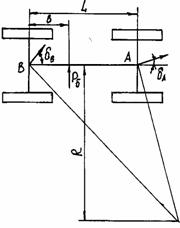
Рис.15. Схема к примеру 3п.2
Из условия равновесия автомобиля в горизонтальной плоскости определены силы в точках В и А:
Углы увода задних и передних колес соответственно равны:
или в радианах соответственно:

Радиус дуги окружности, описываемой автомобилем, равен:
|
