1. Общие сведения
В настоящей лабораторной работе рассматривается применение ПЛК FX3U и сервоусилителя MR-J3-10A для управления серводвигателем. Схема лабораторного стенда представлена на рисунке 1.
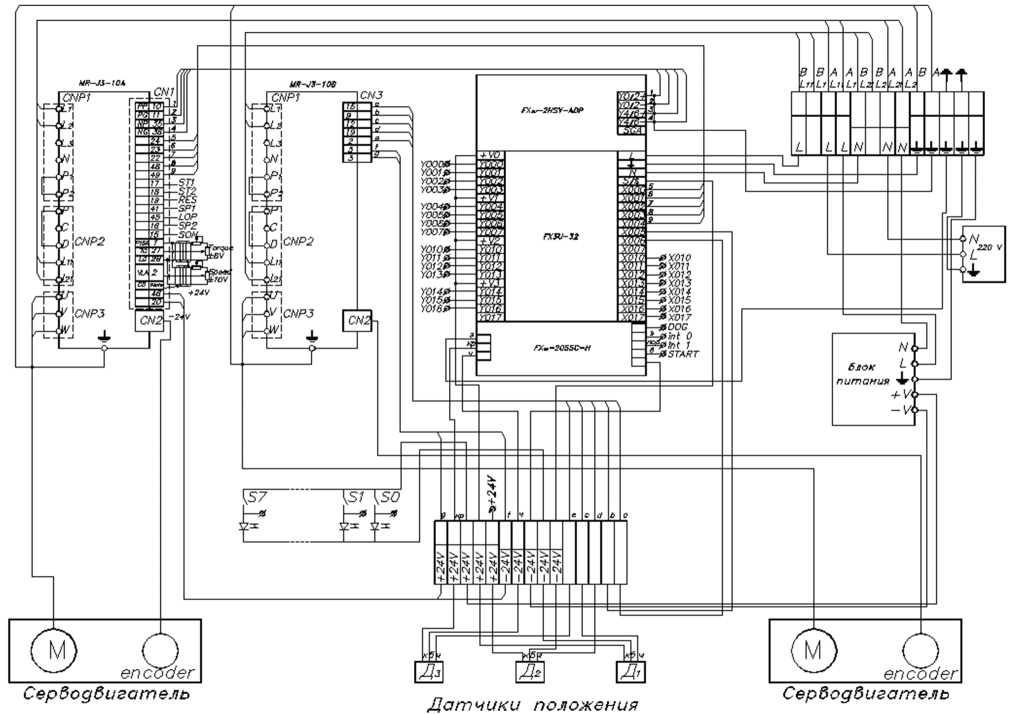
Рисунок 1: Схема лабораторного стенда.
Как видно из схемы управление серводвигателем реализуется посредством контроллера FX3U и адаптера FX3U-2HSY-ADP, непосредственно связанного с сервоусилителем MR-J3-10А.
Функциональные возможности сервоусилителя позволяют изменять его режим работы не только через параметры цифрового интерфейса, но и с помощью аналоговых сигналов. На лицевую панель стенда выведены потенциометры, формирующие аналоговые сигналы на входах сервоусилителя MR-J3-10А. Один (Torque) позволяет изменять значение крутящего момента в процессе работы двигателя (диапазон изменения напряжения, задающего крутящий момент, равен -8 В ? +8 В), другой (Speed) позволяет изменять значение скорости вращения ротора двигателя в процессе его работы (диапазон изменения напряжения, задающего скорость вращения ротора двигателя, равен -10 В ? +10 В). Так же на лицевую панель лабораторного стенда выведены следующие входы сервоусилителя: SON (сигнал, предназначенный для включения сервоусилителя), SP2 (постоянная частота вращения ротора серводвигателя №2), ST1 (вращение ротора против часовой стрелки или прямое вращение, или левое), ST2 (вращение ротора по часовой стрелки или обратное вращение, или правое), RES (предназначен для сброса сигнала об аварии), SP1 (постоянная частота вращения ротора серводвигателя №1) и LOP (предназначен для смены режима управления). Входы считаются активными, если на них подаётся потенциал +24 В, что можно осуществить при помощи тумблеров, расположенных на лицевой панели лабораторного стенда. Возможности стенда позволяют осуществлять управление двигателем в следующих режимах:
• режим управления положением;
• режим управления положением/скоростью;
• режим управления скоростью;
• режим управления скоростью/моментом;
• режим управления моментом;
• режим управления моментом/положением.
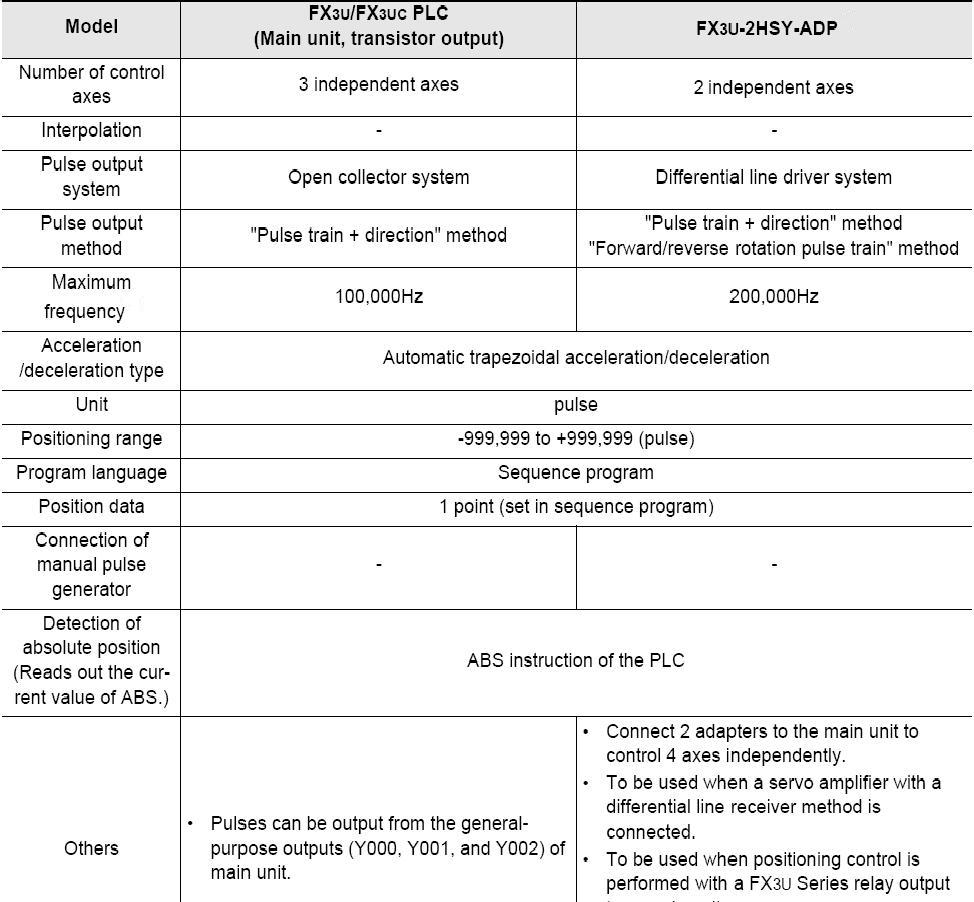
К контроллеру FX3U без модулей расширения можно подключить три сервоусилителя, при этом частота импульсов, формируемых ПЛК для сервоусилителей, не будет превышать 100 кГц. Поскольку частота этих импульсов определяет скорость вращения роторов двигателей, для ее увеличения к контроллеру FX3U подключаются дополнительные блоки расширения. В данной работе используется адаптер FX3U-2HSY-ADP, обеспечивающий частоту задающих импульсов равную 200 кГц и способный контролировать работу двух сервоусилителей. К контроллеру можно подключить не более двух адаптеров FX3U-2HSY-ADP. Ниже приведены характеристики, показывающие преимущества использования адаптера (см. табл. 1), хотя контроллер FX3U может управлять серводвигателем и без него.
Таблица 1: Возможности управления серводвигателем напрямую от ПЛК и с использованием адаптера.
Более подробно рассматриваемые возможности описаны в[2].
В лабораторных работах [3,4] выполнявшихся на базе данного стенда было рассмотрено построение системы управления серводвигателем с использованием модуля расширения FX3U-20SSC-H.
2. Программирование сервоусилителя и контроллера.
Интерфейс сервоусилителя MR-J3-10A позволяет задать параметры позиционирования без использования контроллера и ПК.
Программирование сервоусилителя.
Для настройки параметров позиционирования, а также индикации результатов диагностики, аварийной сигнализации и состояния используется дисплей, расположенный с лицевой стороны сервоусилителя (5-разрядный 7-сегментный светодиодный дисплей). Переключать индикацию и функции дисплея можно с помощью четырёх клавиш: MODE, UP, DOWN и SET. Ниже (см. рис.2) приведён рисунок, раскрывающий назначение клавиш и сегментов индикатора.
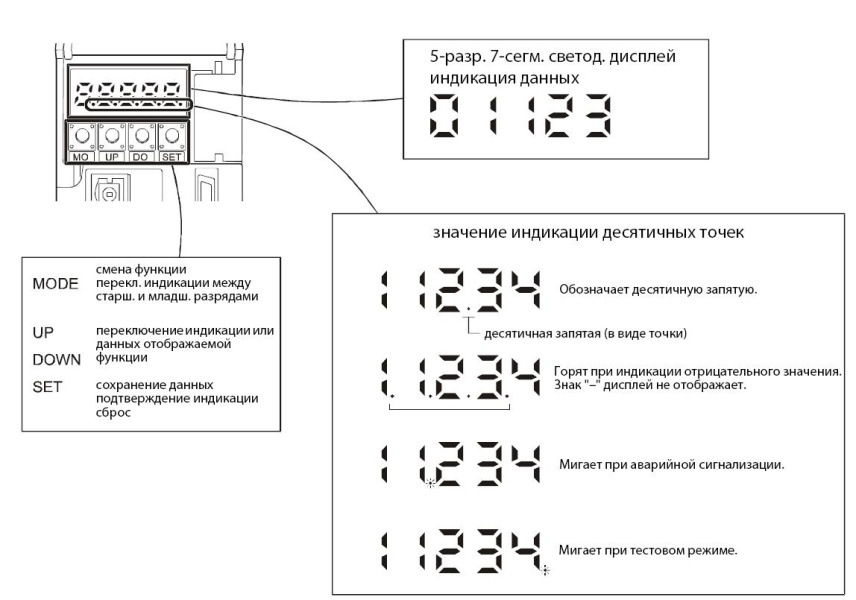
Рисунок 2: Назначение клавиш и сегментов индикатора.
Приведём пример задания режима управления серводвигателем «управление скоростью» (см. рис.3).
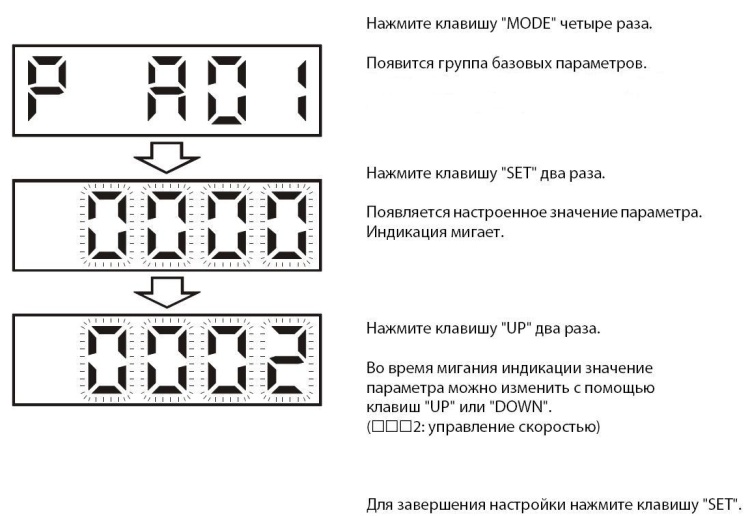
Рисунок 3: Задание режима управления частотой вращения двигателя.
В зависимости от задания на управление серводвигателем без использования контроллера в данной лабораторной работе потребуется установка соответствующего режима управления (см. табл.3):
Таблица 3: Установка режима управления.
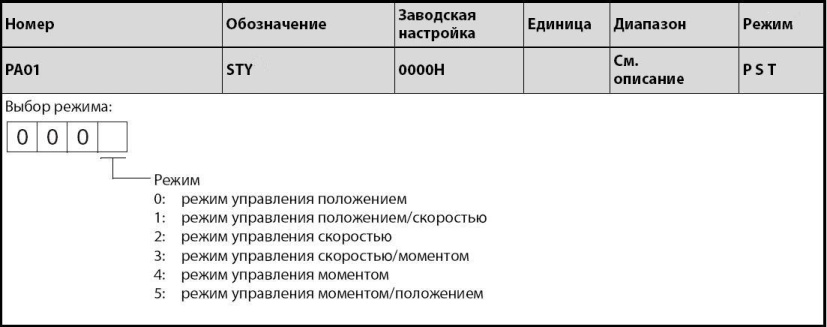
Работа системы без контроллера может быть осуществлена только в режимах 2, 3, 4 (см. табл.3). При выборе комбинированного режима управления переход между режимами осуществляется при помощи входного сигнала LOP, гнездо которого расположено на лицевой панели лабораторного стенда. Переход между режимами управления, при выборе комбинированного режима, можно осуществлять в ходе работы двигателя. В режиме управления скоростью используются входы сервоусилителя, выведенные на лицевую панель стенда (SON, SP2, ST1, ST2, RES, SP1, LOP). Предназначение каждого из них описано выше. Используя входы SP1 и SP2 можно получить третью постоянную частоту вращения ротора серводвигателя. Если оба этих входа неактивны, то скорость вращения ротора двигателя задаётся через аналоговый вход сервоусилителя Speed. В режиме управления моментом используется аналоговый вход Torque, также можно задать фиксированные моменты вращения ротора двигателя, используя входы сервоусилителя SP1 и SP2. За дополнительной информацией обращайтесь к литературе [1].
Программирование контроллера для управления приводом.
Для осуществления управления серводвигателем, используя контроллер, необходимо для сервоусилителя выбрать режим управления 0, 1 или 5 (см. табл.3). Используя контроллер FX3U в паре с адаптером FX3U-2HSY-ADP можно выполнять множество операций по управлению серводвигателем (см. [2]). В лабораторной работе подробно рассмотрены операции DRVA, DRVI и ABS.
При использовании операции DRVA изменение скорости вращения ротора двигателя графически будет иметь вид, показанный на рис.4.
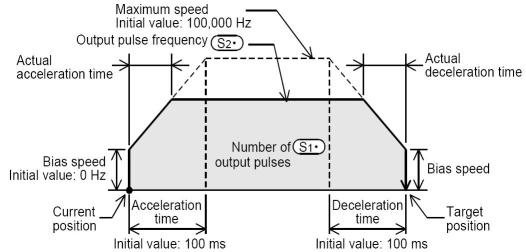
Рисунок 4: Исполнение операции DRVA/DRVI.
Формат задания операции DRVA представлен в таблице 4.
Таблица 4: Формат задания операции DRVA.

Назначение параметров S1 и S2 определяется из рисунка 4. В D1 указывается выход контроллера, от которого задающие импульсы будут поступать на сервоусилитель. В D2 указывается выход контроллера, который выполняет функцию управления направлением вращения ротора двигателя (прямое вращение или обратное (см. табл.5)). В соответствии со схемой соединения (см. рис. 1) для этих целей использованы D1=Y000, D2=Y004. Выходы контроллера Y000 и Y004 могут выполнять различные функции (см. табл.5):
• Y000 может передавать на сервоусилитель импульсы прямого вращения ротора двигателя, при этом Y004 будет передавать импульсы реверса.
• Y000 может передавать на сервоусилитель импульсы, частота следования которых определяет частоту вращения ротора, а направление вращения зависит от состояния выхода Y004 (см. таблицу 5).
Таблица 5: Виды выходных импульсов задания.
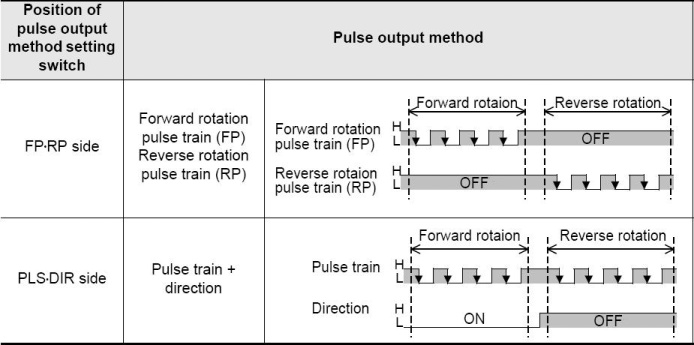
FP-RP и PLS-DIR — возможные положения переключателя, расположенного на лицевой панели адаптера.
Исполнение операции DRVA отличается от DRVI только тем, что DRVA задаёт абсолютное значение координаты (при этом положение ротора двигателя перед исполнением этой команды принимается за нулевое, счетчик положения обнуляется), а DRVI — задаёт инкремент приращения (относительно текущего положения ротора двигателя).
Операция ABS передаёт контроллеру информацию от сервоусилителя о текущем положении ротора серводвигателя. Формат задания этой операции изображён на рисунке 5.

Рисунок 5: Формат задания операции ABS.
S представляет собой первый из трёх последующих входов контроллера, к которым будет передаваться абсолютное положение ротора двигателя. D1 — первый из трёх последующих выходов контроллера, от которых будет исходить информация об абсолютном положении ротора двигателя. D2 — запоминающее устройство, в которое будет записываться информация об абсолютном положении ротора серводвигателя (регистр контроллера). В нашем случае при 16-битной информации используется специально отведённый для этих целей регистр D8340, при 32-битной информации используется пара регистров D8340 (младшие разряды) и D8341 (старшие разряды). В тех случаях, когда происходит оперирование с 32-битной информацией, то команды операций преобразуются в DDRVA, DDRVI, DABS и т.д.
Пример применения вышеописанных операций:
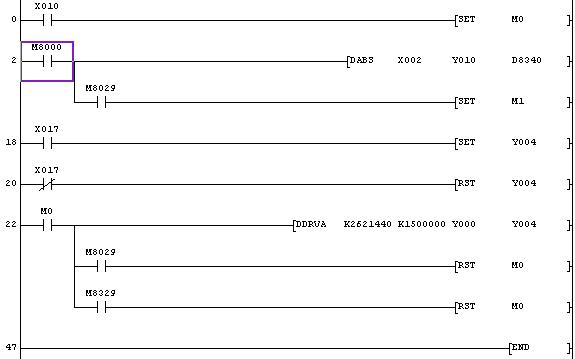
Пример показывает, что при появлении активного сигнала на входе контроллера Х010 ротор двигателя совершает 10 оборотов со скоростью 1500000 Гц. Напомним, что за один оборот ротора энкодер выдаёт 262144 импульсов. Оперируя входом контроллера Х017, осуществляется управление направлением вращения ротора. М8029 и М8329 — маркеры, отведённые под специальные нужды. М8029 устанавливается в ON, если операция завершена успешно (т.е. не произошло аварий или преждевременной остановки), М8329 устанавливается в ON, если операция завершена аварийно. М8000 — маркер, который после включения контроллера всегда находится в состоянии ON.
3. Постановка задачи.
Задача 1: Осуществить управление серводвигателем без использования контроллера. Использовать режим управления скоростью/моментом. В режиме управления скоростью осуществить задание скорости вращения ротора от аналогового входа сервоусилителя Speed, а также получить вращение ротора на трёх запрограммированных скоростях, используя входы сервоусилителя SP1 и SP2. Переключить сервоусилитель в режим управления моментом. Осуществить управление моментом на роторе серводвигателя с помощью сигнала поступающего на аналоговый вход Torque.
Задача 2: Осуществить управление серводвигателем с использованием контроллера. Разработать программу, осуществляющую прямое и обратное вращение ротора серводвигателя на заданной скорости. Направление вращения должно задаваться сигналом тумблера на лицевой панели стенда. Разрешение на вращение должно формироваться сигналом от тумблера. Записать программу в ПЛК, проверить её работоспособность.
4. Содержание отчета.
Лабораторная работа считается выполненной успешно при наличии оформленного протокола (отчета), практической реализации требуемого алгоритма управления, умении выполнять разработку и редактирование программы контроллера в среде GX-Developer v8, а так же записывать ее в контроллер.
Протокол лабораторной работы должен содержать следующие разделы:
1. Цель работы.
2. Схема управляемой системы.
3. Алгоритмы решения поставленных задач.
4. Описание решения задач, используемых элементов и команд.
5. Выводы по работе.
5. Контрольные вопросы.
1. В чём состоит преимущество использования ПЛК в управлении серводвигателем перед управлением только от сервоусилителя?
2. Какие различия между адаптером FX3U-2HSY-ADP и модулем расширения FX3U-20SSC-H?
3. С какой целью используется адаптер FX3U-2HSY-ADP?
4. Чем функционально и конструктивно отличается сервоусилитель MR-J3-10A от MR-J3-10B?
5. Для каких целей используется операция ABS в программе ПЛК управления серводвигателем?
6.Список используемой литературы.
1. Melservo. Сервоусилители и серводвигатели. Руководство по эксплуатации MR-J3-A/A4.
2. User’s manual — Positioning Control Edition. FX3U/FX3UC series programmable controllers. Transistor output: FX3U main unit (sink output/sourse output), FX3UC main unit [Japanese model (sink output)]. Line driver output: FX3U-2HSY-ADP.
3. Методические указания к лабораторной работе « Система управления серводвигателем HF-KP13 на базе ПЛК FX-3U и сервоусилителя MR-J3-10B (среда программирования: GX-Developer v8)».
4. Методические указания к лабораторной работе « Программирование контроллера FX3U и модуля FX3U-20SSC-H в среде программирования GX Developer v8 и FX Configurator-FP».