1. Общие сведения
В настоящей лабораторной работе рассматривается применение ПЛК и сервоусилителя для управления серводвигателем. Схема лабораторного стенда представлена на рисунке 1.
Рисунок 1: Схема лабораторного стенда.
В данной работе рассматривается управление серводвигателем посредством контроллера FX3U, модуля расширения контроллера FX3U-20SSC-H и сервоусилителя MR-J3-10В.
Серводвигатель осуществляет линейное позиционирование рабочего органа посредством передачи винт-гайка без редуктора. На пути позиционирования объекта расположены 3 индуктивных датчика положения. Входы Х010-Х017 и выходы У000-У016 контроллера выведены на лицевую сторону стенда для осуществления необходимой коммутации в соответствии с заданной программой. Входы Х000-Х007 отведены под специальные нужды. Они подключены к информационным выходам сервоусилителя (Х000-Х004 показывают состояние сервоусилителя MR-J3-10A, вход Х005 активен, когда позиционирование завершилось, а вход Х006 срабатывает при появлении сигнала об ошибке). Чтобы задействовать выведенные входы контроллера, на них необходимо подать напряжение (+24 В). Для этих целей можно использовать тумблеры, расположенные на лицевой стороне стенда.
К контроллеру FX3U без модулей расширения можно подключить 3 сервоусилителя, при этом частота задающих импульсов не будет превышать 100 кГц. Для увеличения частоты импульсов задания к контроллеру FX3U подключаются дополнительные блоки расширения. В данной работе используется блок FX3U-20SSC-H, обеспечивающий частоту задающих импульсов равную 50 МГц и способный контролировать работу двух сервоусилителей. К контроллеру можно подключить 8 модулей FX3U-20SSC-H.
Модуль расширения при позиционировании объекта вырабатывает серию импульсов, которые поступают на сервоусилитель. Сервоусилитель в соответствии с характером задающих импульсов обеспечивает вращение ротора серводвигателя. В серводвигатель встроен абсолютный датчик позиционирования (энкодер). За один оборот ротора двигателя энкодер вырабатывает 262144 импульсов, которые в качестве обратной связи поступают на сервоусилитель. Он сравнивает количество задающих импульсов с импульсами обратной связи и, когда их разница будет равна нулю, двигатель остановится.
Модуль расширения FX3U-20SSC-H связан с сервоусилителем оптоволоконным кабелем, обмен информацией выполняется по протоколу SSCNET III, который обеспечивает высокую скорость обмена данными. Максимальная частота задающих импульсов при такой конфигурации – до 50 МГц. У модуля есть свои входы управления: 2 входа прерывания (int 0, int 1), команда начала позиционирования (start) и универсальная команда DOG (она может являться сигналом смены скорости, сигналом остановки серводвигателя и др.). Модуль FX3U-20SSC-H обладает собственной памятью, в которую необходимо записывать параметры позиционирования.
2. Программирование контроллера
Осуществить программирование контроллера можно двумя способами:
1. На языке LD в среде GX-Developer v8.
2. На языке LD в среде GX-Developer v8 совместно с пакетом FX Configurator-FP.
В данной лабораторной работе будет использоваться среда GX-Developer v8.
Единицей информации в программируемом контроллере является бит. Состояние входов и выходов контроллера может принимать только два состояния: "О" и "1". В контроллере могут использоваться данные различных форматов, в том числе маркеры. В контроллере MELSEC семейства FX регистры данных представляют собой слово (см. рис.2).
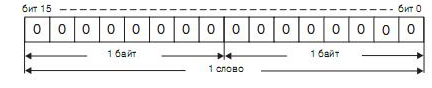
Рисунок 2: Регистр данных.
Благодаря 16-битному размеру в каждом регистре можно сохранять значения в диапазоне от -32768 до 32767. Если этого недостаточно, два слова можно объединить в двойное 32-битное слово, в котором можно сохранять значения от -2147483 648 до 2147 483 647. Эта возможность используется, например, для работы со счетчиками. За подробной информацией обращайтесь к документу [2].
Модуль FX3U-20SSC-H обладает собственной памятью. Все параметры позиционирования необходимо записать в память модуля до начала движения. Осуществляется это с помощью команды Uo\Gi, где о — номер модуля расширения (0..7), i — адрес ячейки памяти в блоке (0..15399). По каждому адресу может быть записана 16-битная информация. Чтобы считать информацию из модуля, необходимо использовать команду FROM. Чтобы осуществить запись параметров в память — TO или MOV.
При записи в память 32-битного числа перед вышеуказанными командами необходимо добавить «D..»: DFROM, DTO, DMOV.
Пример 1 :

К0 означает, что данные будут переданы в модуль с номером 0.
К518 — данные будут записаны, начиная с регистра с адресом BFM#518.
К4М0 — блок, состоящий из маркеров М0-М15.
К2 — количество переданных блоков.
Таким образом, пример показывает, что информация, которую будут нести маркеры с М0 по М31 будут записаны в память модуля BFM#518 и BFM#519.
Пример 2 :

Пример показывает, что данные из регистров базового модуля D500 и D501 передаются по адресу BFM#500 и BFM#501 в память модуля расширения с номером 0.
Пример 3 :

К1 — номер модуля.
К0 — адрес памяти в модуле, с которого будет считываться информация.
D10 — регистр памяти в базовом модуле, с которого будут записаны данные.
К1 — количество переданных регистров.
Отсюда следует, что содержимое регистра BFM#0 модуля расширения 0, будет передано в регистр D10 базового модуля.
Подробно обо всех возможностях программирования модуля FX3U-20SSC-H можно прочесть в документе [1].
3. Постановка задачи.
Необходимо осуществлять позиционирование рабочего органа в точку с заданной координатой и с определённой скоростью. При этом кроме координаты и скорости позиционирования, необходимо задать максимальную скорость, время разгона и торможения объекта.
Графически движение объекта будет иметь вид (см. рис. 3):
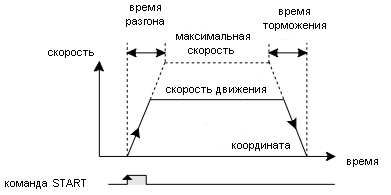
Рисунок 3: Позиционирование в заданную точку.
При программировании скорость движения задаётся в герцах, а координата — в импульсах (дискретах). При этом нужно учитывать, что максимальная величина перемещения при нулевом начальном положении может быть для данного стенда около 3 200 000 импульсов. Знак при числе, характеризующего координату, определяет, в какую сторону будет осуществляться движение объекта. Если «+», то вперёд (forward rotation, см. рис.4).

Рисунок 4: Позиционирование объекта.
Объект имеет нулевую координату по умолчанию в том случае, если он расположен в зоне срабатывания датчиков Д1 и Д3 (см. рис.1). В остальных положениях при включении питания объект будет иметь координату отличную от нуля. Запоминание координаты положения объекта при отсутствии внешнего питания привода за счет встроенного аккумулятора в сервоусилителе.
Регистры памяти модуля (см. табл. 1), использование которых необходимо для выполнения работы (использовать только параметры для оси Х):
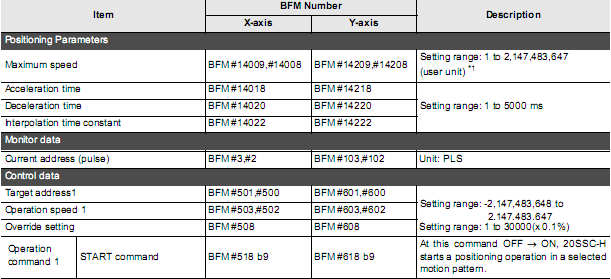
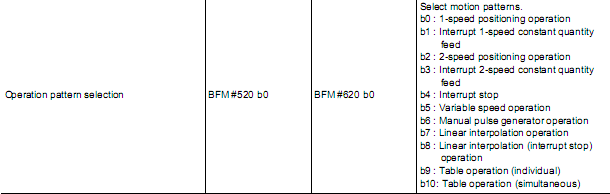
Таблица 1: Регистры памяти модуля, необходимые для выполнения работы.
Так же для того, чтобы буферные данные были активными, и сервоусилитель был готов к работе, необходимо записать в память BFM#519 параметр K528.
Датчики Д1 и Д3 (см. рис.1) предназначены для остановки серводвигателя в целях предотвращения механических разрушений. Датчик Д1 останавливает рабочий орган при реверсе (reverse rotation), Д3 — при движении рабочего органа вперёд (forward rotation).Для активации датчиков Д1 и Д3 необходимо установить бит №0 в регистре BFM#14044. Датчик Д2 используется в качестве сигнала смены скорости DOG.
Для подробной информации смотри документ [1].
4. Содержание отчета.
Лабораторная работа считается выполненной успешно при наличии оформленного протокола (отчета), практической реализации требуемого алгоритма управления, умении выполнять разработку и редактирование программы контроллера в среде GX-Developer v8, а так же записывать ее в контроллер.
Протокол лабораторной работы должен содержать следующие разделы:
1. Цель работы.
2. Схема управляемой системы.
3. Алгоритм решения поставленной задачи.
4. Описание решения задачи и основных используемых элементов.
5. Выводы по работе.
5. Контрольные вопросы.
1. Поясните назначение элементов сервопривода по структурной схеме рассматриваемой системы.
2. Каковы принципы управления двигателем с помощью сервоусилителя?
3. Какие параметры модуля управления должны быть установлены для выполнения требуемой задачи?
4. Назовите базовые команды, которые используются при составлении программы для реализации процесса позиционирования.
5. Приведите основные характеристики сервопривода, реализованного Вами. Сформулируйте преимущества и положительные стороны данной системы управления?
6.Список используемой литературы.
1. FX3U-20SSC-H USER'S MANUAL.
2. Семейства MELSEC FX. Программируемые контроллеры. Пособие для начинающего программиста. FX1S, FX1N, FX2N, FX2NC, FX3U.
3. MELSERVO. Сервоусилители и серводвигатели. Руководство по эксплуатации.MR-J3-B/B4.