1. Общие сведения
Данная лабораторная работа основывается на навыках, полученных при выполнении лабораторной работы на тему: «Система управления серводвигателем HF-KP13 на базе ПЛК FX-3U и сервоусилителя MR-J3-10B (среда программирования: GX-Developer v8)».
Сервоусилители MR-J3 способны управлять двумя серводвигателями одновременно (ось Х и Y). При совместной работе двух двигателей позиционирование рабочего органа может происходить в плоскости. Данный лабораторный стенд предполагает использование только одной оси Х, которая выполняет линейное позиционирование рабочего органа посредством передачи винт-гайка.
Модуль расширения контроллера FX3U-20SSC-H может быть запрограммирован без использования программы FX Configurator-FP путём записи всех необходимых параметров позиционирования в память модуля в среде GX-Developer v8. Вместо того чтобы заполнять соответствующие регистры в программе ПЛК, FX Configurator-FP позволяет использовать иной способ программирования сервосистем, при этом интерфейс пользователя более удобен.
За подробной информацией о данном пакете обращайтесь к документам [1] , [2], [3].
2. Программирование контроллера
Среду программирования FX Configurator-FP можно запустить, используя меню Tools в пакете GX-Developer v8.
В программе FX Configurator-FP можно установить следующие параметры управления серводвигателем:
1. Параметры позиционирования.
2. Параметры сервоусилителя.
3. Таблица операций:
а) для оси Х;
б) для оси Y;
в) одновременно для осей Х и Y (используется в случае осуществления
позиционирования одного объекта двумя серводвигателями в двухмерном
пространстве).
Также данный пакет позволяет проводить мониторинг, с помощью которого представляется возможным определение текущих параметров позиционирования: скоростей, координат, времен разгона/торможения и т.д.
В «параметрах позиционирования» и «параметрах сервоусилителя» можно изменить только те данные, которые отмечены синим цветом.
В «параметрах позиционирования» устанавливаются такие параметры, как: масштабный коэффициент канала скорости, заданное время разгона/торможения и т.д.
В «параметрах сервоусилителя» устанавливается модель сервоусилителя, базовые параметры установки, параметры усиления/фильтрации и дополнительные параметры установки.
Программирование таблицы операций.
В «таблице операций» должен быть записан набор команд позиционирования и их параметры. Командами могут быть: позиционирование на одной скорости, позиционирование на двух скоростях, операции прерывания, позиционирование на множестве скоростей, задержка времени, переход на другую строку таблицы и др. В «таблицу операций» можно ввести до 300 команд позиционирования. Все эти команды будут записаны в специально отведённую для них память модуля расширения (BFM#1000 — BFM#3995).
Также в каждой строке таблицы предлагается ввести м-код. Существует два типа м-кодов:
1) код, который заносится в память после завершения операции (диапазон значений: 0-9999).
2) код, который заносится в память во время начала операции (диапазон значений: 10000-32767).
В первом случае переход на другую строку операции может быть осуществлён только в случае установки бита «m-code OFF» (BFM#518b11) в ON. Во втором случае будут выполняться последовательно все строки операций до строки с командой «END» независимо от состояния бита «m-code OFF». Если м-код не установить, то он будет считаться неактивным и сохранится в памяти в виде числа
«-1». Если установить в каждой строке операций м-код равный «-1», то все команды в таблице будут выполняться последовательно.
Таблицу операций всегда необходимо заканчивать строкой с командой «END». Эта команда даёт сигнал сервоусилителю о завершении позиционирования. Следовательно, при повторной команде START (BFM#518b9) команды позиционирования повторятся. Иначе необходимо будет совершить перезагрузку.
После ввода всех необходимых параметров позиционирования, в среде
GX-Developer необходимо задать условие активизации команды START (т. е. программное условие или внешний сигнал, которые приведут к установке бита b9 регистра памяти BFM#518 в состояние логической единицы) и в регистре BFM#521указать номер строки из таблицы операций , начиная с которой будут активизироваться (исполняться) запрограммированные команды. В целях безопасности необходимо активировать датчики конечных положений Д1 и Д3 (см. [4], рис.1). Для этого необходимо занести «1» в регистр BFM#14044.
Используя среду GX-Developer необходимо указать контроллеру характер позиционирования, что является обязательным для любой программы управления серводвигателем. Для этого необходимо установить соответствующий бит регистра BFM#520 в состояние логической единицы (см. табл. 1):
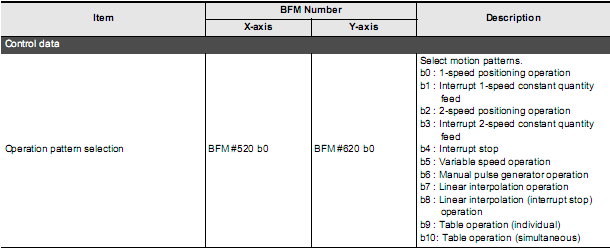
Таблица 1: Выбор характер позиционирования.
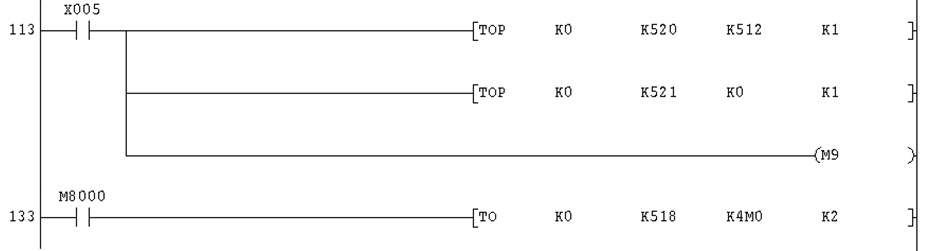
Пример фрагмента программы, реализующей позиционирование:
При этом таблица операций выглядит следующим образом (см. табл. 2):

Таблица 2: Таблица операций.
В данном примере при появлении сигнала на входе Х005 контроллера последовательно будут выполнены команды позиционирования, заданные в таблице операций, начиная со строки №0.
В результате работы данной программы изменение скорости рабочего органа будет осуществляться в соответствии с рисунком 1.
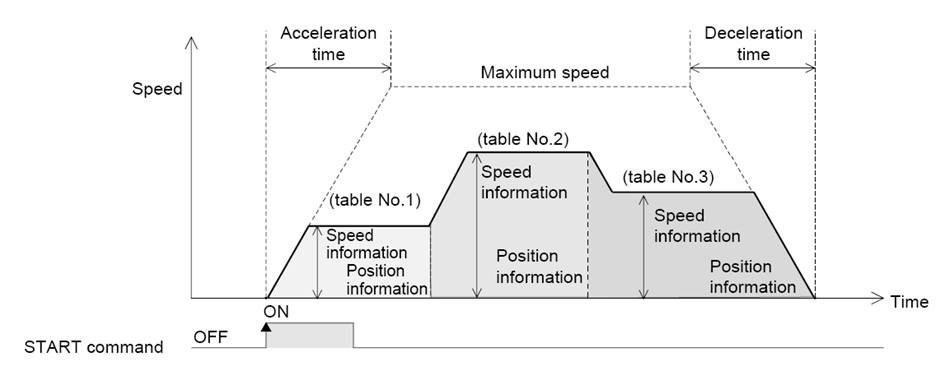
Рисунок 1: Изменение скорости, запрограммированное при позиционировании рабочего органа.
Команда «Absolute address specification» указывает на то, что начальное положение объекта принимается нулевым. Существует возможность задания перемещений в приращениях. В этом случае заданное перемещение отрабатывается от текущего положения рабочего органа. Для этого используется команда «Incremental address specification». Команду «Absolute address specification» задавать необязательно — она используется по умолчанию.
Программирование, используя «параметры позиционирования» в программе FX Configurator-FP.
Программа FX Configurator-FP позволяет задать команду «Mechanical Zero Return». Эта команда используется в том случае, если требуется сместить систему координат в которой задаются перемещения рабочего органа. При программировании этой команды необходимо выбрать направление движения рабочего органа, скорость перемещения и сигнал, по которому система координат будет смещена. В процессе исполнения команды рабочий орган перемещается на заданной скорости в заданное направление до тех пор пока не появится соответствующий сигнал. Появление сигнала приводит к смещению системы координат. При этом в счетчик текущего положения записывается значение координаты, заданное в команде «Mechanical Zero Return». При этом необходимо задать параметры команды «Mechanical Zero Return» в меню «параметры позиционирования». Сигналом начала выполнения данной команды является переход из состояния «0» в состояние «1» бита «Mechanical zero return command» (регистр BFM#518b6).
Графически движение объекта при действии команды «Mechanical Zero Return» будет иметь вид:
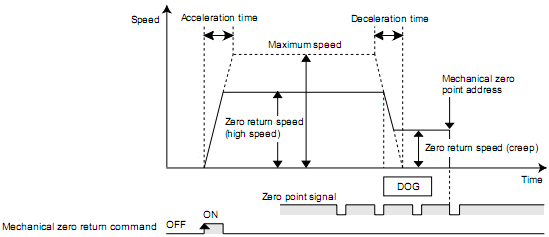
Рисунок 2: Исполнение команды «Mechanical Zero Return».
Из рисунка 2 видно, какие параметры команды «Mechanical Zero Return» необходимо задать в меню «параметры позиционирования» программы FX Configurator-FP:
• Zero point signal;
• Mechanical zero point address;
• Maximum speed;
• Zero return speed (high speed);
• Zero return speed (creep);
• Acceleration time;
• Deceleration time.
Рисунок 2 поясняет назначение вышеперечисленных параметров.
Входной сигнал DOG модуля FX3U-20SSC-H выведен на лицевую панель стенда. Активировать его можно двумя способами:
1) Задействовать входной сигнал DOG блока расширения FX3U-20SSC-H, который выведен на лицевую панель.
2) Задействовать входной сигнал DOG сервоусилителя MR-J3-10B, используя датчик Д2 (см. [4], рис.2). Для обеспечения возможности использования данного способа необходимо установить в единичное состояние бит №2 в регистре BFM#14044.
Кроме параметров, указанных на рисунке 2, в меню «параметры позиционирования» необходимо установить следующие параметры:
• OPR mode: 0:DOG;
• OPR direction: Decrease present value (forward rotation) или Increase present value (reverse rotation).
• Zero signal count start timing: Forward end of DOG.
При создании программы нужно учитывать, что расстояние между датчиками Д1 и Д3 стенда (см. [4], рис.2) оценивается приблизительно в 3200000 импульсов, которые вырабатывает энкодер при перемещении рабочего органа от одного датчика к другому.
3. Постановка задачи.
Задача 1: С использованием таблиц операций написать программу, осуществляющую позиционирование рабочего органа на 3-х разных скоростях в диапазоне перемещений от датчика Д1 до датчика Д3. Выполнить задержку времени (Dwell) во время смены скоростей. Характер изменения скорости должен иметь вид, представленный на рисунке 1. При этом рабочий орган на первых двух скоростях должен двигаться в одном направлении, а на третей скорости — в противоположном. Параметры позиционирования задаются произвольно, с учётом выше описанных ограничений.
Задача 2: Выполнить команду«Mechanical Zero Return». Исходным положением рабочего органа считать нахождение его в зоне действия датчика Д1 (см. [4], рис.2) Осуществить движение рабочего органа вперёд, остановить его до достижения зоны действия датчика Д3, используя сигнал DOG. Текущей координате присвоить новое значение, равное 100 импульсам. Проверить правильность выполнения задачи, используя встроенный в программе FX Configurator-FP режим мониторинга.
Для того, чтобы параметры движения и значения счетчика координат полученные при исполнении команды «Mechanical Zero Return» стали активными, и сервоусилитель был готов к работе, необходимо записать в регистр BFM#519 число 528.
4. Содержание отчета.
Лабораторная работа может считаться выполненной успешно при наличии оформленного протокола (отчета), практической реализации поставленных задач, умении выполнять разработку и редактирование программы контроллера в среде GX-Developer v8 и FX Configurator-FP, а так же записывать ее в контроллер.
Протокол лабораторной работы должен содержать следующие разделы:
1. Цель работы.
2. Алгоритмы решения поставленных задач.
3. Описание решения и основных используемых параметров и их значений.
4. Выводы по работе.
5. Контрольные вопросы.
1. Назначение, возможности и ограничения программы GX-Developer при разработке и программировании систем управления позиционированием?
2. Назначение, возможности и ограничения программы Configurator-FP при разработке и программировании систем управления позиционированием?
3. В чём преимущество использования двух программ GX-Developer и FX Configurator-FP по сравнению с использованием только GX-Developer?
4. Для чего в команде механического возврата в нуль используется входной сигнал модуля расширения DOG?
5. Какое количество команд перемещения может быть задано с помощью таблицы операций?
6. Для чего в таблице операций используется м-код?
6.Список используемой литературы.
1. FX3U-20SSC-H USER'S MANUAL.
2. FX Series Position Control Training Manual.
3. FX3U-20SSC-H Technical Overview.
4. Методические указания к лабораторной работе на тему: «Система управления серводвигателем HF-KP13 на базе ПЛК FX-3U и сервоусилителя MR-J3-10B (среда программирования: GX-Developer v8)».