
2.1. Горизонтальный способ управления
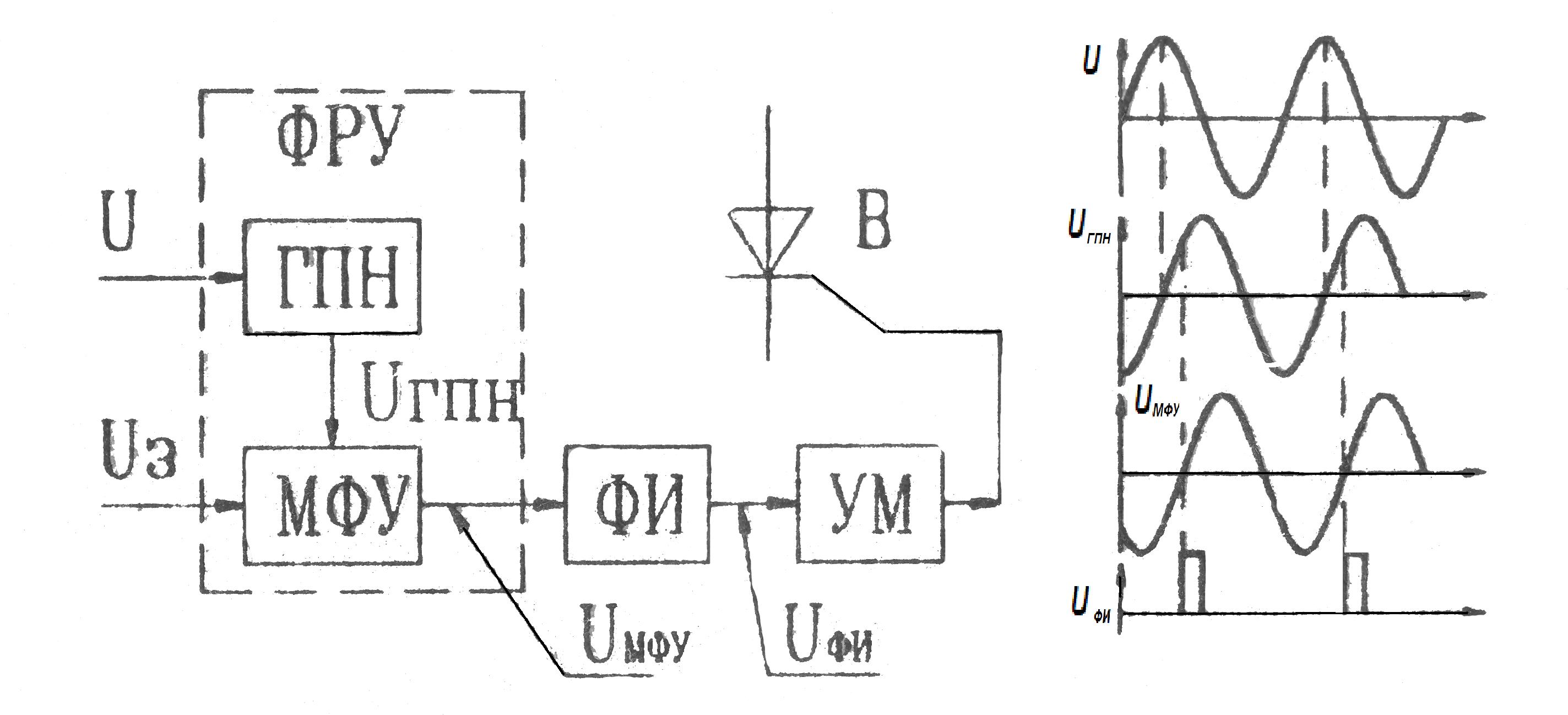
При горизонтальном способе управления формирование управляющего импульса осуществляется в момент перехода синусоидального напряжения через нулевое значение , а изменение его фазы обеспечивается изменением фазы синусоидального напряжения управления, т.е. смещением его по горизонтали (оси времени t). Генератор переменного напряжения ГПН выдает синусоидальное напряжение, находящееся в определенном фазовом соотношении с анодным напряжением тиристора В энергетического (силового) канала (рис. 1, а). .
Рис. 1 - Организация СИФУ
С выхода мостового фазовращательного устройства МФУ сдвинутое по фазе напряжение управления Uмфу поступает на формирователь импульсов ФИ, где в момент перехода синусоиды через нулевое значение формируется импульс управления. Затем импульс управления Uфи усиливается усилителем мощности УМ до значения, необходимого для надежного управления тиристора В по управляющему электроду. Угол сдвига фаз (рис.1, б) регулируется изменением напряжения задания U , а ГПН и МФУ в совокупности образуют фазорегулирующее устройство ФРУ. Горизонтальный метод управления не нашел широкого применения, т.к. мостовые фазовращательные устройства критичны к форме и частоте подаваемого напряжения, а использование в качестве активного регулируемого сопротивления транзисторов приводит к нарушению симметрии формируемых импульсов. 2.2. Вертикальный метод управления
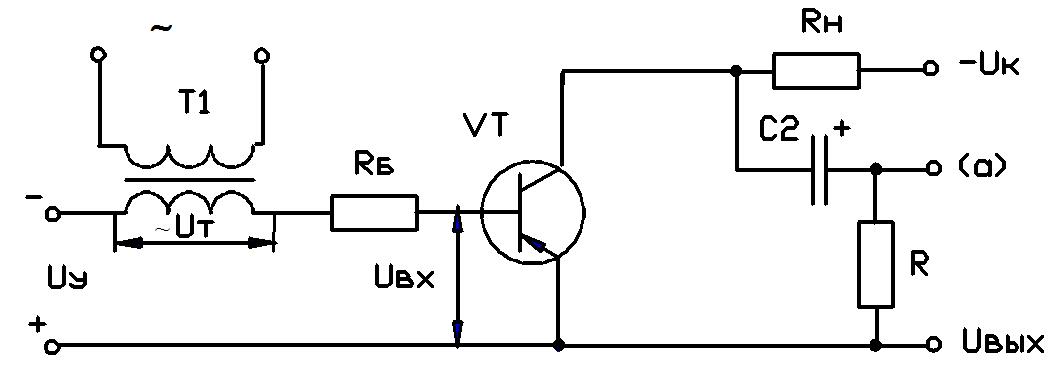
При вертикальном методе управления формирование управляющего импульса производится в результате сравнения на нелинейном элементе величины переменного (синусоидального, пилообразного, треугольного) и постоянного напряжений. В момент, когда эти напряжения становятся равными, происходит формирование управляющего импульса управления тиристором В. Фазу импульса можно изменять, регулируяуровень постоянного напряжения U . На рис.2, а приведена схема простейшего устройства, формирующего импульсы по вертикальному методу управления на управляющем электроде тиристора В.
а)
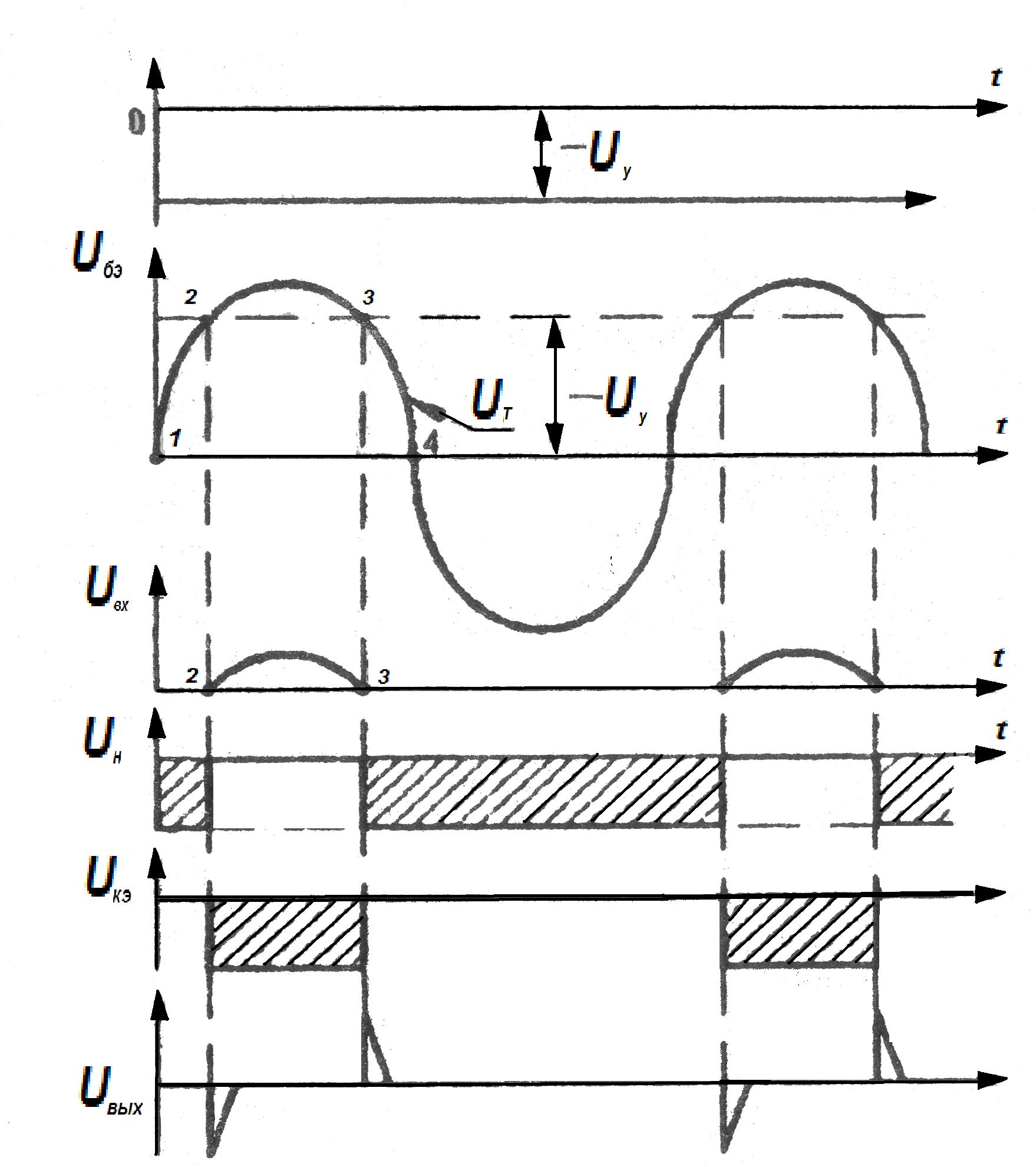
б) Рис. 2. Реализация принципа вертикального управления (а) и временные диаграммы формируемых напряжений (б). Входное напряжение U транзистора VТ в любой момент времени t определяется алгебраической суммой постоянного и переменного U напряжений. Когда напряжение Uт изменяется по амплитуде от нулевого значения (точка 1) до значения (точка 2, рис. 2,б), на базе транзистора VТ присутствует отрицательный потенциал и транзистор открыт. Напряжение источника питания (-U ) почти полностью приложено к нагрузке Rн. В период времени, когда мгновенные значения напряжений (U ) = ( ), что соответствует точкам 2-3, к участку эмиттер-база транзистора VТ прикладывается разностное положительное напряжение синусоиды и транзистор VT закрывается (до точки 3). В момент запирания транзистора VТ напряжение (- Uк) прикладывается к RС-цепочке, составленной из резисторов Rн, R и конденсатора С2. На резисторе R при заряде конденсатора С2 формируется (при дифференцировании) отрицательный импульс напряжения (точка а). На участке 2-3 транзистор VТ закрыт и к транзистору приложено напряжение ( - U ). В т. 3, когда (U ) становится несколько меньше (- ) транзистор VТ открывается, разряжая конденсатор С2 на резистор R. Импульсы, формируемые данным устройством, подаются затем на усилитель мощности УМ системы управления. Фаза этих импульсов изменяется при изменении величины постоянного напряжения . По такому принципу построены одноканальные СИФУ. 2.3. Многоканальная система импульсно-фазового управления Принцип построения структурной схемы многоканальной синхронной СИФУ можно пояснить на примере (рис. 3).
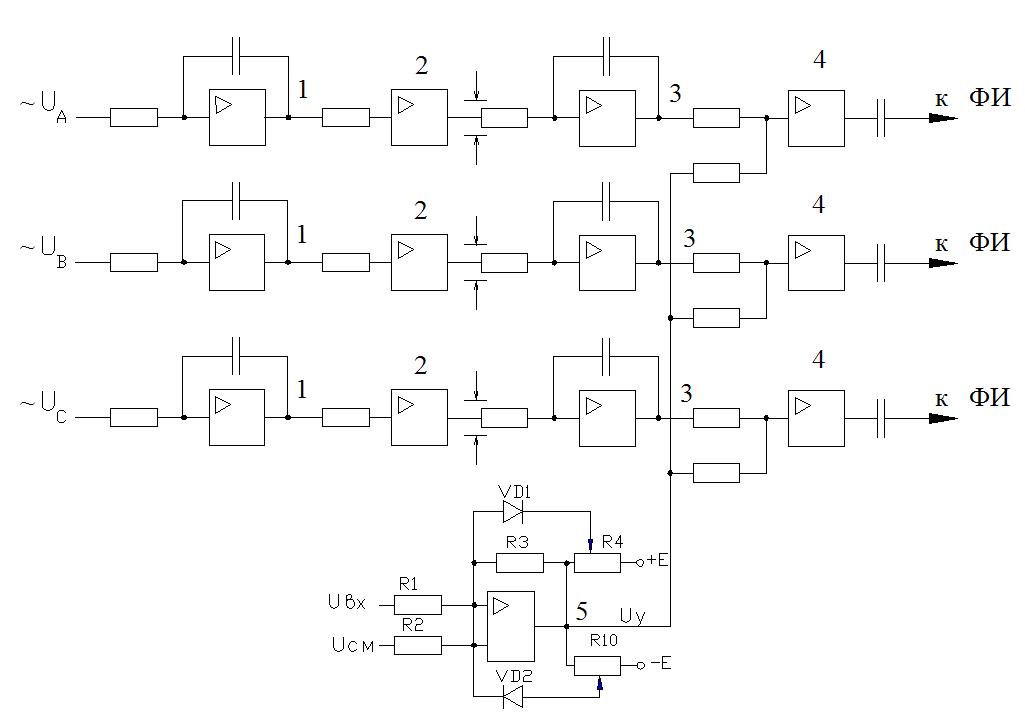
Рис. 3 - Структурная схема многоканальной СИФУ
Схема СИФУ построена на серийных интегральных микросхемах с малой степенью интеграции, включая активные сетевые фильтры на операционных усилителях 1, подключенные на вторичные обмотки 3-х фазного синхронизирующего трансформатора с пониженным напряжением 15-25 В фаз (Ua, Ub, Uс). Для исключения влияния амплитудных изменений напряжения сети на параметры пилообразного напряжения, получаемого с интегратора 3, напряжение с сетевого фильтра поступает на компаратор 2, преобразующий сигнал в двухполярное прямоугольное напряжение. После интегратора 3 пилообразное развертывающее напряжение сравнивается на входе компаратора 4 с напряжением управления Uу. В момент их равенства с выхода компаратора 4 подается импульс на формирователь выходного импульса ФИ. Согласующий усилитель 5 является общим для всех каналов и инвертирующим. Передаточный коэффициент усилителя внутри пределов ограничения составит:
При достижении напряжением значения, устанавливаемого на потенциометрах R4 и R5 для разных полярностей напряжения , открывается цепь одного из диодов VD1 или VD2 в зависимости от полярности напряжения . После этого передаточный коэффициент становится равным:
Обычно расчетное значение R1>>R4 и характеристика "вход-выход" в зоне «ограни-чения» имеет малый наклон по отношению к оси . Смещение характеристики "вход-выход" усилителя осуществляется введением в цепь управления напряжения смещения U . В общем случае при синхронном способе формирования угла управления (угол подачи ?i для i — го импульса управления) определяется выражением:
где - угол начала отсчета фазы по отношению к напряжению сети; р - число пульсаций преобразователя; Qi - регулируемый угол задержки, равный Qi = , где i=1,2....; ? - угловая частота сети, рад ; t - время.
|
 (3)
(3)