ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
“ДОНСКОЙ
ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ”
(ДГТУ)
Факультет “Автоматизация и информатика”
Кафедра «Приборостроение»
«УТВЕРЖДАЮ»
Проректор по учебной работе
____________ А.С.Коробцов
"_____" _____________ 2008 г.
ПРОГРАММА МЕЖДИСЦИПЛИНАРНОГО ЭКЗАМЕНА
по специальности 200100.65 - Приборостроение
Ростов-на-Дону
2008 г.
Программа междисциплинарного экзамена соответствует
требованиям Государственного образовательного стандарта полного высшего
профессионального образования по направлению 200100.62 – Приборостроение.
Программа составлена к.т.н., проф. В.Н.Ананченко, к.т.н., доц. И.К.Цыбрий.
Рассмотрена на заседании кафедры “Приборостроение”, протокол №1 от 27.08.2007 г.
Заведующий
кафедрой
В.Н.Ананченко
Одобрена советом специальности (направления) 200101 –
Приборостроение.
Председатель
совета
В.Н.Ананченко
СОГЛАСОВАНО:
Декан
факультета
В.Н.Ананченко
Заведующая организационно-методическим отделом
А.И.Азарова
1. Основные положения.
Программа составлена на основе Примерной программы
междисциплинарного экзамена по направлению подготовки дипломированных
специалистов 200101.65 - Приборостроение, рекомендуемой Учебно - методическим
советом.
В основу программы экзамена положены следующие
дисциплины.
Общий математический и естественно-научный цикл (ЕН):
- Информатика:
- Физические основы получения информации.
Общепрофессиональный цикл (ОПД):
- Механика;
- Детали, теория механизмов приборов и основы
конструирования;
- Материаловедение и технология конструкционных
материалов;
- Общая электротехника;
- Электроника и микропроцессорная техника;
- Метрология, стандартизация и сертификация;
- Основы автоматического управления;
- Основы проектирования приборов и систем;
- Компьютерные технологии в приборостроении.
Специальный цикл (СД):
- Микропроцессоры и ЭВМ;
- Схемотехника измерительных устройств;
- Технология приборостроения;
- Теория измерений.
- Системы
автоматизированного проектирования и конструирования измерительных приборов;
- Надежность приборов
и систем;
- Точность измерительных приборов;
- Теория систем автоматического контроля;
- Автоматизированные системы сбора и обработки
измерительной информации;
- Оптико-электронные приборы;
- Методы и средства систем автоматического
контроля.
Данный экзамен является заключительным этапом
подготовки специалистов по направлению 200101.65 и имеет целью:
- проверить теоретические знания и практические
навыки;
- определить умение применять полученные знания и
навыки при решении конкретных задач;
- установить подготовленность выпускника к
профессиональной деятельности.
2. Содержание
программы.
Информатика
Понятие информации, общая характеристика процессов
сбора, передачи, обработки и накопления информации; технические и программные
средства реализации информационных процессов; модели решения функциональных и
вычислительных задач; алгоритмизация и программирование; языки программирования
высокого уровня; базы данных; программное обеспечение и технологии
программирования; локальные и глобальные сети ЭВМ; основы защиты информации и
сведений, составляющих государственную тайну; критерии оценки степени
защищенности информации; защита файлового ресурса; методы защиты информации.
Физические основы получения информации
Основы взаимодействия физических полей с веществом;
физические явления и эффекты, используемые для получения измерительной и
управляющей информации: механические, электрические, магнитные, оптические,
химические, ядерные и др.; области и возможности применения физических явлений
и эффектов в технике измерений; закономерности проявления физических эффектов,
их техническая реализация, понятие преобразователя информации; измерение
физических величин различной природы; постановка и методы решения задач
информационного поиска, анализа и синтеза физических явлений и эффектов для
создания средств измерений, управления, диагностики и контроля.
Механика
Механика кинематика точки и твердого тела, уравнения и
параметры движения, элементы статики, силовое поле, система сил, уравнения
равновесия, динамические характеристики механической системы, теоремы и
уравнения динамики, напряженно-деформированное состояние изотропного тела;
обобщенный закон Гука, константы упругости, теория прочности, растяжение,
сжатие, кручение, изгиб, устойчивость элементов, структура и
кинематика механизмов; кинетостатический и динамический анализ; рычажные
механизмы; механические передачи трением и зацеплением; синтез механизмов и
методы его оптимизации
Детали, теория механизмов приборов и основы
конструирования
Классификация узлов и деталей; механические свойства
конструкционных материалов; предельные состояния и критерии расчета несущей
способности; требования к деталям по критериям работоспособности; механические
передачи; валы и оси; опоры с трением качения, скольжения и внутренним трением;
уплотнительные устройства; упругие элементы; муфты; соединение деталей;
направляющие; корпусные детали; расчеты элементов механизмов на прочность,
жесткость и точность; типовые конструкции и методы механической регулировки; основные
этапы проектирования и конструирования; взаимозаменяемость деталей
и технические измерения.
Материаловедение и технология конструкционных
материалов.
Строение металлов и сплавов, пластическая деформация,
влияние нагрева на структуру и свойства деформированного металла, механические
свойства металлов и сплавов, конструкционные материалы, термическая и
химико-термическая обработка металлов, конструкционные пластики, композиты,
электротехнические материалы, получение заготовок литьем и пластическим
деформированием, пайка и склеивание материалов, формообразование поверхностей
деталей резанием, электрофизическими и электрохимическими способами обработки,
обработка поверхностей деталей абразивным инструментом, точность обработки и
шероховатость поверхности деталей, типовое технологическое оборудование и
инструменты.
Общая электротехника
Электрические и магнитные цепи: основные определения,
топологические параметры и методы расчета электрических цепей, линейные и
нелинейные цепи, анализ и расчет магнитных цепей, переходные процессы в цепях:
электромагнитные устройства и электрические машины: электромагнитные
устройства, трансформаторы, электродвигатели постоянного тока, асинхронные
машины, синхронные машины, информационные электрические машины: поворотные
трансформаторы, сельсины, индуктосины, редуктосины, тахогенераторы, шаговые
двигатели.
Электроника и микропроцессорная техника
Основы электроники: элементная база электронных
устройств, источники вторичного электропитания, усилители и генераторы
электрических сигналов, линейные и нелинейные преобразователи сигналов,
импульсные устройства; основы цифровой электроники: логические функции и
логические элементы; комбинационные и последовательностные логические схемы; сопряжение аналоговых и цифровых устройств; ЦАП и АЦП; запоминающие устройства; программируемые логические интегральные схемы; микропроцессорные средства: архитектура,
система команд; организация ввода-вывода; периферийные
устройства; микропроцессы в измерительной технике и управлении.
Метрология, стандартизация и сертификация
Теории и средства измерений, результат и погрешности
измерений, обработка результатов измерений, основные положения
законодательной метрологии, эталоны, поверочные схемы,
государственная метрологическая служба; стандартизация: цели и
задачи, государственная и международные системы стандартизации,
категории и виды стандартов, международная организация по
стандартизации (ИСО), государственный контроль и надзор за
внедрением и соблюдением стандартов; сертификация: цели и объекты
сертификации, качество продукции, основы квалиметрии, экспертные
методы оценки качества, системы сертификации, органы сертификации,
аккредитация испытательных лабораторий, сертификация услуг.
Основы автоматического управления
Предмет и задачи автоматики; статические и динамические
системы; понятие о состоянии системы; структура систем автоматического
управления; описание систем управления; классификация звеньев; временные
характеристики; частотные характеристики и передаточные функции; дискретное
описание линейных звеньев; анализ и описание качества систем управления;
устойчивость, критерии устойчивости; оценки точности в переходном и
установившемся режимах; инвариантность и чувствительность систем
управления; особенности процессов в нелинейных системах, метод
гармонической линеаризации; методы анализа и синтеза систем
управления; управляемость и наблюдаемость; оптимальные системы
управления; нестационарные системы управления и их математические
модели; цифровые системы управления; системы управления при
случайных воздействиях; элементы систем управления.
Основы проектирования приборов и систем
Классификация приборов: измерительные, следящие,
информационные, управления; функциональная структура приборов, функциональные
устройства, блоки; условия и режимы работы; характеристики качества приборов и
систем (погрешность, надежность, информационная емкость, статистические и
динамические характеристики); измерительные сигналы, их виды и типы, модели сигналов;
структурно-математические модели процессов в приборах; преобразование
измерительных сигналов в приборах; прибор как каскад преобразователей; типы
преобразователей и преобразование ими сигналов; линейные и нелинейные
преобразователи; информационные аспекты преобразования сигналов;
преобразователи различных физических величин и полей; взаимность и обратимость
преобразователей; уравнения и параметры преобразователей; помехозащищенность;
взаимодействие преобразователей с внешней средой; методы расчета статистических
и динамических характеристик приборов, оценка погрешностей, расчет надежности;
этапы проектирования, методы и средства автоматизации проектных
процедур, методы вариантного проектирования, системные подходы
к проектированию, функционально-параметрическое
проектирование, конструкторско-технологическое проектирование,
разработка конструкций, создание проектной документации.
Компьютерные технологии в приборостроении
Общие сведения о ЭВМ; операционные системы;
программы-оболочки; работа с файлами; защита от компьютерного вируса;
конфигурирование системы, основы языков программирования; программные среды
конечного пользователя (текстовые процессоры, электронные таблицы, среды типа Matlab
и т.п.); математические и моделирующие программы общего назначения; решение
типовых расчетных задач; способы ввода экспериментальной информации в
компьютер; программные средства управления экспериментом и обработки данных;
среды типа LabView; программные средства оформления документов; использование
сетевых технологий.
Микропроцессоры и ЭВМ
Основные понятия. Основные характеристики и типы
микропроцессоров (МП). Типичная структура микропроцессорной системы.
Классификация и архитектура микропроцессоров. Архитектура и организация
микропроцессорных устройств и ЭВМ. Программирование микропроцессорных
измерительных устройств Организация интерфейса микропроцессорных систем.
Устройства памяти. Принципы построения измерительных приборов и систем с
микропроцессорным управлением. Практическая реализация микропроцессорных
измерительных приборов.
Схемотехника измерительных устройств
Схемотехника элементов аналоговых измерительных
каналов, усилители измеряемых величин, выпрямители; функциональные
преобразователи; АЦП и ЦАП; схемотехнические методы защиты от помех; синтез
комбинационных, логических устройств различного назначения; схемотехника
цифровых устройств; схемотехника информационно-измерительных устройств,
работающих на основе различных физических принципов.
Технология приборостроения
Основы технологии приборостроения, изготовления
заготовок и деталей приборов; методы разработки и оснащения технологических
процессов изготовления, сборки, юстировки и испытаний приборов; технологичность
деталей и конструкции сборочных единиц; механизация и автоматизация процессов
изготовления, сборки и испытаний приборов; технологии быстрых прототипов, типовых деталей приборов; хранение и транспортирование приборов.
Теория измерений
Основные положения теории измерений; измерительные
сигналы, помехи и возмущения; условия измерений; показатели качества
измерительных устройств, критерии оптимальности, алгоритмы работы; методы
получения оценок параметров измерительных процессов; задачи фильтрации,
экстраполяции, интерполяции; понятие технического интеллекта; методы и
алгоритмы решения задач адаптации к меняющимся условиям измерений; методы
проведения измерений; разработка программы и методики измерений; оптимальное
планирование эксперимента.
Системы автоматизированного проектирования и
конструирования измерительных приборов
Системы автоматизированного проектирования и
конструирования измерительных приборов назначение и области
применения САПР-ИТ, структура и типовые компоненты САПР-ИТ; организационная
и функциональная структуры САПР разных уровней, обеспечение
САПР-ИТ, типовые пакеты прикладных программ (ППП); методы
проектирования, этапы автоматизированного проектирования,
структурно-параметрическое, функционально-параметрическое, конструкторско - технологическое
проектирование; моделирование структур и функций ИП; структурно-математические
модели приборов, разработка схем и методик моделирования, ППП для
моделирования; анализ и синтез статистических, динамических, точностных, надежностных
характеристик ИП, ППП для расчета и оптимизации характеристик ИП; разработка
конструкций ИП и создание документации; ППП для решения типовых задач различной
сложности, разработка баз данных
Надежность приборов и систем
Основные понятия теории надежности. Надежность системы
и свойства надежности: безотказность, долговечность, ремонтопригодность, сохраняемость.
Виды резервирования. Количественные характеристики надежности. Надежность
элементов электронной аппаратуры механических элементов, программного
обеспечения. Расчет надежности невосстанавливаемых приборных систем. Анализ
надежности невосстанавливаемых приборных систем при резервировании Анализ
надежности восстанавливаемых приборных систем. Методы и способы повышения надежности
приборных систем. Типы и виды испытаний на надежность.
Точность измерительных приборов
Характеристики точности, причины и виды ошибок
функционирования приборов; инструментальные, методологические и
эксплуатационные погрешности; систематические и случайные составляющие
погрешности; понятие о первопричинах погрешности функционирования; степень
влияния различных ошибок на результирующую точность; методы компенсации
погрешностей; проверочные расчеты на точность; структурные методы компенсации
конструктивных погрешностей; расчеты на точность при проектировании (точностной
синтез).
Теория систем автоматического контроля
Структура системы автоматического контроля (САК). Принципы
построения основных цепей САК. Системы автоматического контроля в процессе
производства изделий (активный контроль). Метрологические основы построения
САК: Принцип Аббе, точность при контактном и бесконтактном контроле, износ
измерительных наконечников. Подналадочные системы (активный послеоперационный
контроль). Подналадка по одной детали. Структура предельной погрешности.
Алгоритм управления точностью обработки. Статистические методы подналадки: по
медиане выборки деталей, по среднему размеру выборки деталей. Структура
предельной погрешности. Методы подналадки малыми импульсами. Ограничения на
величину подналадочного импульса. Анализ структурных схем самонастраивающихся
САК по возмущению и отклонению. Особенности расчета пассивных контролирующих
систем. Расчет циклограмм контрольно сортировочных автоматов.
Автоматизированные системы сбора и обработки
измерительной информации
Назначение и принципы построения автоматизированных
измерительных систем (АИС). Структура и состав универсальной автоматизированной
измерительной системы. Совместимость средств приборно-модульных АИС. Назначение, классификация и варианты применения
интерфейсов. Стандартный интерфейс для
приборно-модульных АИС – канал общего пользования (КОП). Последовательный
интерфейс RS-232C. Сопряжение
датчиков с компьютерами IBM PC через последовательный порт. Сопряжение
датчиков с компьютерами через системную магистраль. Информационно-измерительные
системы на базе стандарта VXIbus (IEEE 1155).
Оптико-электронные приборы
Обобщенные схемы и методы работы. Основные параметры и
характеристики излучателей, законы теплового излучения. Назначение, структура и
особенности оптической системы ОЭП, критерии её качества. Основные виды
приёмников излучения, применяемых в ОЭП. Одноэлементные координатные и
развертывающие приёмники излучения, многоэлементные приёмники. Анализаторы изображения
оптико-электронных приборов. Обобщенные структурные схемы оптико-электронных
приборов. ОЭП в военной технике, системах астронавигации и народном хозяйстве. Методы
расчета основных параметров и характеристик ОЭП. Критерии качества ОЭП.
Энергетические расчеты ОЭП. Критерии точности. Точностные расчеты ОЭП.
3. Вопросы экзаменационных билетов.
1.
Предложите и обоснуйте принципиальные решения по модернизации оптико -
механического горизонтального длинномера на основе компьютеризации обработки
результатов измерений и управления работой прибора. Встроенное вычислительное
устройство должно также обеспечивать автоматическое вычисление размеров и
выдачу контролируемых параметров на экран видеоконтрольного и
алфавитно-цифрового печатающего устройств.
Основные
показатели назначения модернизированного прибора:
- диапазон
измерения наружных размеров, мм 0 - 100
- пределы
допускаемой основной погрешности, мкм ± (1,4+L/140)
(L- измеряемый размер в мм);
- дискретность
отсчета, мкм 0,5
- измерительное
усилие, Н 0,5; 1,0; 1,5; 2,0
- режим
управления - автоматический, ручной;
- развитие
измерительного усилия – автоматическое.
Предлагаемые
решения должны содержать:
1) конструктивно-функциональную
схему прибора;
2) структурную
схему информационной части;
3) обоснованный
выбор преобразователя перемещения и схемы его включения;
4) анализ
факторов, обеспечивающих заданные требования к точности;
5) схемное
решение обеспечения вывода результатов измерений на семисегментные индикаторы;
6) временные
диаграммы вывода информации на цифровые семисегментные индикаторы.
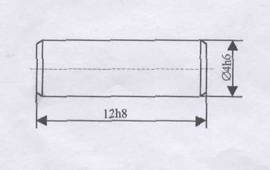
2. Деталь,
указанная на чертеже, обрабатывается по диаметру диаметр 4h6-0,008 на бесцентровошлифовальном
станке, имеющем массу исполнительного органа М=500 кг. Исполнительный орган
перемещается по направляющим скольжения с известными характеристиками сил
трения покоя и движения fn=O,15 и fд =0,05 соответственно. Перемещение
осуществляется от винтового привода с длиной нарезанной части стального винта
1=0,5 м и средним диаметром 50 мм. Точностные статистические параметры технологического
процесса известны и составляют: среднеквадратическое отклонение собственно
случайной погрешности σ = 0,4 мкм, функциональная составляющая линейна с
а=0,1мкм/дет.
1. Предложите
функциональную схему подналадочной системы при подналадке по среднему диаметру
выборки.
2.
Разработайте кинематическую схему позиции измерения.
3.
Произведите обоснованный выбор измерительного преобразователя линейных
перемещений и схему его включения.
4. Предложите
конструкцию измерительной позиции с настроечными элементами; сформулируйте
технические требования для сборочной единицы "Позиция измерительная".
5.
Приведите структуру суммарной погрешности обработки детали на бесцентровошлифовальном
станке с подналадкой, выделите основные составляющие погрешности.
6. Разработайте
метрологическую схему настройки подналадочной системы.
7. Оцените
величину подналадочного импульса.
3.
Предложите и обоснуйте принципиальные решения по модернизации оптико -
механического вертикального длиномера на основе компьютеризации обработки
измерительной информации и управления работой прибора. Встроенное
вычислительное устройство должно также обеспечивать автоматическое вычисление
размеров и выдачу контролируемых параметров на экран видеоконтрольного и
алфавитно-цифрового печатающее устройств.
Основные
показатели назначения модернизированного прибора:
- диапазоны
измерения наружных размеров, мм 0÷100
- пределы допускаемой основной
погрешности, мкм ±(0,3+L/800)
(L-измеряемый размер в мм);
- дискретность
отсчета, мкм 0,5
- измерительное
усилие, Н 0,5; 1,0; 1,5; 2,0
- режим
управления - автоматический, ручной;
- развитие
измерительного усилия – автоматическое.
Предлагаемые
решения должны содержать:
1) конструктивно
- функциональную схему прибора;
2) структурную
схему информационной части прибора;
3) обоснованный
выбор преобразователей перемещения и схемы их включения;
4) анализ
факторов, обеспечивающих заданные требования к точности;
5) алгоритмы
программирования вычислительного устройства при работе в режимах: «среднее
арифметическое», «средний диаметр резьбы», «отклонение от круглости».
4. Предложите
и обоснуйте основные принципиальные решения по созданию автоматических
сортировочных весов, предназначенных для сортировки взвешиваемых изделий в
форме цилиндров по весовым категориям и автоматической разбраковки изделий. Тип
весов - с силовой компенсацией, без коромысла.
Встроенная
микропроцессорная система (микроконтроллер) должна обеспечивать возможность
вывода на цифровой дисплей и цифропечать информации о результате, дате и
времени измерения и разбраковки, а также итоговых результатов о количестве
изделий, отнесенных к каждой группе разбраковки ("норма",
"больше", "меньше") за сутки и за месяц.
Основные
характеристики:
- номинальное
значение измеряемой массы, не более, кг 150
- предел
допускаемой относительной погрешности, % 0,5
- время успокоения,
не более, с 0,2
- дискретность
измерения (кг) и диапазоны измерения задаются с клавиатуры оператором.
Предлагаемые
решения должны содержать:
1) конструктивно-
функциональную схему прибора;
2) структурную
схему микроконтроллера;
3) обоснованный
выбор преобразователя перемещений в электрический сигнал и схемы его включения;
4) схему разбраковки
на три группы (или алгоритм отработки информации контроллера);
5) анализ факторов,
обеспечивающих точность и быстродействие системы;
6) конструктивное
решение узла взвешивания;
7) предложите
вариант конструкции исполнительного механизма разбраковки изделий.
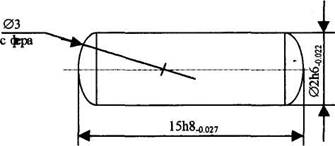
5. Детали,
указанные на чертеже, обрабатываются по диаметру 2h6-0,006 на бесцентровошлифовальном
станке. Точностные статистические характеристики технологического процесса известны
и составляют: среднеквадратическое отклонение собственно случайной погрешности s
= 0,3 мкм, функциональная составляющая линейна с=0,1 мкм/деталь.
1. Предложите
функциональную схему подналадочной системы при подналадке по медиане.
2. Разработайте
метрологическую схему настройки подналадочной системы.
3. Проведите
конструктивную проработку измерительной позиции.
4. Выберите
с обоснованием измерительный преобразователь линейных перемещений, поясните его
конструкцию, принцип действия и схему его включения.
5. Проанализируйте
факторы, влияющие на формирование суммарной погрешности обработки на бесцентровошлифовальном
станке с подналадкой.
6. Предложите
конструкцию исполнительного привода микроподачи ведущей бабки станка при подналадке.
7. Составьте
алгоритм расчета медианы выборки для встроенной управляющей ЭВМ.
6. Предложите
и обоснуйте основные принципиальные решения по созданию цифрового измерителя
массы коромыслового типа с силовой компенсацией.
Прибор
должен обеспечивать возможность вывода на цифровой дисплей и на цифропечать
информации о результате, дате и времени измерения, а также итоговых значений за
сутки и за месяц и передачу информации в последовательном коде на центральную
ЭВМ.
Основные
характеристики:
- значение
измеряемой массы, не более, кг 50
- предел
допускаемой относительной погрешности, % 0,5
- время
успокоения, не более, с 3
- максимальное
число измерений за сутки 240
Предлагаемые
решения должны содержать:
1) структурную
схему прибора;
2) структурную
схему микроконтроллера, осуществляющего обработку, хранение и вывод информации;
3) обоснованный
выбор измерительного преобразователя и схемы его включения;
4)
структуру аналоговой цепи с обоснованием состава входящих в нее
преобразователей и расчетом основных параметров и разрядности кодов, получаемых
при дальнейшем аналого-цифровом преобразовании;
5) анализ факторов,
обеспечивающих точность и быстродействие системы;
6) алгоритмы
обработки информации и передачи в центральную ЭВМ.
7. Предложите
и обоснуйте основные принципиальные решения по разработке микропроцессорного
прибора для бесконтактного измерения температуры теплоизоляционного слоя
железнодорожной цистерны при следующих показателях назначения:
- пределы
температуры теплоизоляционного слоя, °С 0…400
- предел
допускаемой погрешности,°С 0.5
Прибор должен
обеспечивать представление измерительной информации в цифровой форме, выработку
сигналов сигнализации о превышении заданных пределов контроля, возможность
работы при различных режимах.
Предлагаемые
решения должны содержать:
1) структуру
приемной оптической системы прибора;
2) обоснованный
выбор оптического приемника излучения и схемы его включения;
3) обоснованный
выбор способа модуляции оптического сигнала и конструкции модулятора и его
привода;
4) структурную
схему микроконтроллера;
5) физическое
обоснование используемого метода бесконтактного измерения температуры;
6) структуру
аналоговой цепи с обоснованием состава входящих в нее преобразователей и
расчетом основных параметров и разрядности кода, получаемого при последующем
аналого-цифровом преобразовании.
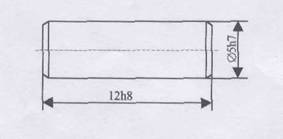
8. Деталь,
указанная на чертеже, обрабатывается по диаметру 5h7-0,012 на
бесцентрово-шлифовальном станке. Точностные статистические характеристики технологического
процесса известны и составляют: среднеквадратическое отклонение собственно случайной
погрешности s=0,8 мкм, функциональная составляющая линейна с а=0,2 мкм/деталь.
1. Предложите
функциональную схему подналадочной системы при подналадке по одной детали.
2. Разработайте
метрологическую схему настройки подналадочной системы, определите размеры
настроечной детали.
3. Выберите
с обоснованием измерительный преобразователь линейных перемещений, поясните
его конструкцию, принцип действия и схему включения.
4. Приведите
принципы прогнозной оценки предельной погрешности обработки деталей на
бесцентрово-шлифовальном станке с подналадочной системой.
5. Предложите
конструкцию измерительной позиции подналадочной системы.
6.
Обоснуйте выбор материалов деталей измерительной позиции.
7. Составьте
алгоритм расчета на ЭВМ статистических параметров точности технологического
процесса.
9. Предложите
и обоснуйте основные принципиальные решения по созданию прибора для измерения
рабочего профиля крупногабаритных дисковых кулаков массой до 300 кг и с максимальным перепадом
радиус-векторов до 200 мм.
Прибор
должен обеспечивать выдачу информации в цифровом виде с дискретностью отсчета 0,01 мм и сравнение полученных результатов с
заданной программой, автоматическое проведение десятикратных измерений и их
хранение, передачу в ЭВМ в параллельном и последовательном коде.
Предлагаемые
решения должны содержать:
1) схему
измерения и ее метрологический анализ;
2) структурную
схему прибора;
3) обоснованный
выбор измерительного преобразователя и его схемы включения;
4) структурную
схему микроконтроллера, обеспечивающего преобразование и обработку
измерительной информации и автоматическое арретирование;
5) конструкцию
механизма арретирования измерительного преобразователя;
6) кинематическую
схему и расчет основных параметров редуктора привода вращения кулачка со
скоростью 0,02 об/с при частоте вращения электродвигателя nд=1440 об/мин;
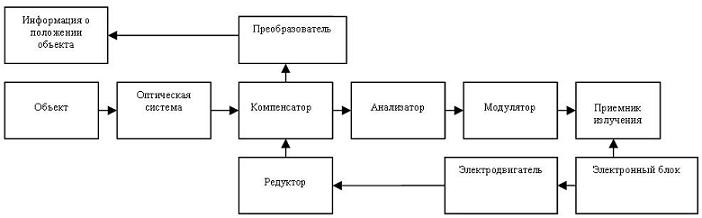
10. Оптико-электронная
следящая система с анализатором изображения в виде светоделительной призмы
имеет следующую структурную схему:
Объектом слежения
является точечный яркий источник излучения удаленный на расстояние до 10 км.
Для этой
системы:
1) предложите
структуру оптической приемной системы и конструкцию компенсатора;
2) предложите
конструкцию модулятора и разработайте его привод;
3) выберите
приемник оптического излучения и обоснуйте свой выбор;
4) предложите
кинематическую схему редуктора привода компенсатора;
5) предложите
преобразователь «изменение положения компенсатора - измерительный сигнал о
координате объекта»;
6) предложите
функциональную схему платы микропроцессора, обеспечивающую прием и преобразование
информации о положении объекта от преобразователя, информации об удалении
объекта из электронного блока, выдачу информации на дисплей и передачу ее в
центральную ЭВМ;
7) предложите
алгоритм вычисления скорости движения объекта.
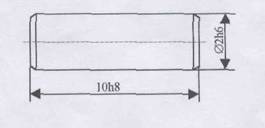
11. Разработайте основные узлы автомата для контроля указанной на
чертеже детали по диаметр 8-0,022 и сортировки на 12 групп (10 групп
- "Годные", "Брак+" и "Брак-"). Для чего:
1) Обоснуйте необходимость разработки подобных контрольно-сортировочных
автоматов.
2) Составьте структурную схему контрольно-сортировочного автомата.
3)
Разработайте кинематическую схему измерительной позиции, обоснуйте схемы базирования и измерения.
4) Проведите обоснованный выбор измерительного преобразователя линейных
перемещений, поясните его конструкцию, принцип действия и схему
включения.
5) Предложите варианты устройств сортировки,
проведите их сопоставительный анализ, обоснуйте выбор оптимального варианта.
6) Проведите анализ факторов, влияющих на формирование суммарной
погрешности контроля.
12.
Предложите и обоснуйте основные принципиальные решения по разработке прибора
для измерения массы бензина в нефтехранилище с учетом температуры окружающего
воздуха при следующих показателях назначения:
масса
бензина при заполненном нефтехранилище, т 20
пределы
измерения температуры окружающей среды, °С -40÷+60
предел
допускаемой погрешности измерения,
кг ±20
Прибор
должен обеспечить: автоматически проведение измерений через каждые 10 минут;
хранение полученной измерительной информации в течении 6-ти часов, а по
истечении этого времени пересылку ее в центральную ЭВМ; вывод текущего значения
массы на цифровой дисплей.
Предлагаемые
решения должны содержать:
1) функциональную
схему прибора;
2) обоснованный
выбор типа первичных преобразователей для измерения массы и температуры, их
конструкцию и схемы включения;
3) структурную
схему платы микроконтроллера;
4) структуры
аналоговых цепей преобразования с обоснованием состава входящих в них
преобразователей и расчетом основных параметров, а также разрядности кодов,
получаемых при дальнейших аналого-цифровых преобразованиях;
5) анализ
составляющих погрешности измерения;
6) алгоритм
обработки информации и передачи ее в центральную ЭВМ, аппаратную реализацию
выполнения алгоритма.
13.
Предложите и обоснуйте основные принципиальные решения по созданию прибора,
предназначенного для измерения массы в пределах 0-10 кг. с погрешностью, не превышающей ±1 г. Прибор должен обеспечивать возможность ввода
с клавиатуры цены одного килограмма товара, ввод кода товара и выдачу на
цифровой дисплей информации о цене, массе и стоимости взвешенного товара,
которая после окончания взвешивания должна передаваться в центральную ЭВМ.
Время
установления показаний, не более 5 с.
Предлагаемые
решения должные содержать:
1) структурную
схему прибора;
2) структурную
схему микроконтроллера, обеспечивающего прием измерительной информации, ее
обработку и передачу на центральную ЭВМ в параллельном ходе;
3) обоснованный
выбор измерительного преобразователя и схемы его включения;
4) расчеты
основных параметров аналоговой цепи преобразования и разрядности кода при
последующем аналого-цифровом преобразовании;
5) анализ
и характеристики составляющих погрешности измерения;
6) анализ
факторов, обеспечивающих заданное быстродействие прибора.
14. Предложите
и обоснуйте основные принципиальные решения по созданию микропроцессорного
профилометра со следующими основными характеристиками.
Измеряемые
величины: - среднее отклонение профиля Ra от средней линии,
высота неровностей Rz, средний шаг Sh по средней
линии;
метод
взаимодействия с исследуемой поверхностью - контактный;
формы
исследуемой поверхности: наружные - плоская и цилиндрическая, отверстия
диаметром свыше 8 мм;
способ
базирования датчика - с опорой на измеряемую поверхность;
предел допускаемой
случайной составляющей приведенной погрешности по параметру Ra - ±1% по остальным парамгтрам
- ±4%.
Встроенный
микропроцессорный блок должен обеспечивать обработку измерительной информации,
вывод информации о значениях измеряемых параметров на цифровой дисплей и на
графопостроитель.
Предлагаемые
решения должные содержать:
1) структурную
схему прибора;
2) обоснованный
выбор измерительных преобразователей микро -неровностей и продольного
перемещения и схемы их включения;
3) расчеты
разрядности информационных кодов;
4) структурную
схему микропроцессорного блока;
5) алгоритмы
обработки информации по трем измеряемым параметрам;
6) анализ
составляющих погрешностей измерения.
15. Предложите
и обоснуйте основные принципиальные решения по разработке микропроцессорного
прибора для измерения больших диаметров в процессе их обработки с помощью
обкатного ролика.
Прибор
должен обеспечивать измерение в заданном сечении как диаметра вращающейся
детали, так и отклонения от круглости с представлением измерительной информации
на цифровой дисплей и передачу в последовательном коде на центральную ЭВМ.
Основные
характеристики:
измеряемый
диаметр,мм 800÷3000
диаметр
измерительного диска, мм 10,0
дискретность
отсчета, мм по 12-му квалитету
число
контрольных оборотов детали 10
Предлагаемые
решения должные содержать:
1) структурную
схему прибора;
2) обоснованный
выбор измерительных преобразователей углового перемещения измерительного диска
и числа контрольных оборотов детали, их схем включения;
3) расчеты
разрядности информационных кодов;
4) структурную
схему микроконтроллера;
5) алгоритмы
обработки информации;
6) анализ
составляющих погрешности измерения.
16. Предложите
и обоснуйте основные принципиальные решения по созданию компьютерного
измерительного микроскопа со следующими характеристиками:
вид
компоновки координатной системы - с подвижным визиром;
пределы
перемещения кареток
по осям: -Х
= (0-100)мм; Уд = (0-75) мм;,
дискретность
отсчета 0,001
мм.
Встроенный
микропроцессорный блок (микроконтроллер) должен обеспечивать: обработку
измерительной информации о перемещении по координатам; вывод информации о
перемещении по осям и результатов обработки на цифровой дисплей, цифропечать и
на центральную ЭВМ.
Предлагаемые
решения должны содержать:
1) структурную
схему прибора;
2) обоснованный
выбор преобразователей линейных перемещений и схемы их включения;
3) структурную
схему микроконтроллера;
4) конструкцию
механизма микроподачи по координатным осям с компенсацией мертвого хода;
5) алгоритмы
обработки информации при определении координат центра и диаметра отверстия по
координатам трех расположенных на нем точек;
6) анализ
составляющих погрешности измерения.
17. Разработайте основные органы автомата для контроля указанной на чертеже
детали по длине и сортировки по диаметру на 4 группы /2-Годные",
"Брак+" и "Брак-". Для этого:
1) обоснуйте необходимость разработки подобных контрольно-сортировочных
автоматов;
2) составьте структурную схему
контрольно-сортировочного автомата;
3) предложите варианты конструкций бункерного
загрузочного
устройства с механической поштучной выдачей
деталей, проведите их сопоставительный
анализ и обоснуйте выбор оптимального варианта;
4) предложите кинематическую схему
позиции измерения с указанием узлов базирования и настройки;
5) проведите обоснованный выбор
измерительных преобразователей линейных перемещений, поясните их конструкцию, принцип действия и схему включения;
6) приведите основные принципы прогнозной оценки
точности
контрольно-сортировочного автомата.
18. Предложите
и обоснуйте основные принципиальные решения по разработке компьютерной системы
автоматического контроля температуры зерновой массы, предназначенной для предотвращения
самовозгорания зерна в силосах элеваторов, со следующими основными
характеристиками:
пределы
измерения температуры, °С 30+0.5
предел
допускаемой погрешности, °С ±0,1
количество
точек контроля 64
период
опроса датчиков, мин 10
виды
сигнализации о превышении заданной верхних значений температуры - звуковой и
световой;
вывод
информации о значениях контролируемого параметра в точках измерения на цифровой
дисплей, а также в последовательном ходе на центральную ЭВМ.
Предлагаемые
решения должные содержать:
1) структурную
схему микроконтроллера;
2) обоснованный
выбор датчика температуры и схемы его включения;
3) структуру
и расчет основных параметров аналоговой цепи преобразования сигналов датчика и
разрядности кодов при последующем аналого-цифровом преобразовании;
4) анализ
составляющих погрешности измерения;
5) конструкцию
корпуса прибора во влагозащищенном исполнении; мероприятия по обеспечению
герметичности корпуса прибора.
19. Разработайте основные органы автомата для контроля указанной на чертеже
детали по 5h80,018 и
сортировки на 11 групп (9 - "Годные", "Брак+" и
"Брак"). Для этого:
1) составьте структурную схему контрольно - сортировочного автомата;
2) предложите Схему транспортирующего органа с
прямолинейным перемещением детали и с
выбросом последней в середине хода толкателя назад;
3) дайте оценку производительности транспортирующего органа, приведите
циклограмму его работы;
4) разработайте метрологическую схему настройки контрольно-сортировочного автомата;
5) предложите схемы измерения и базирования детали на измерительной позиции;
6) проведите обоснованный выбор измерительного
преобразователя линейных перемещений,
поясните его конструкцию, принцип действия и схему включения.
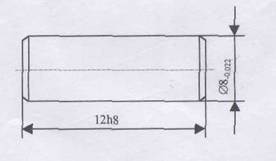
20. Разработайте основные узлы автомата для контроля указанной на чертеже
детали по глубине проточки 12+0,1 и сортировки на 3 группы /"Годные",
"Брак+" и "Брак-"/. Для этого:
1) составьте структурную схему контрольно-сортировочного автомата;
2) предложите кинематическую схему измерительной позиции с
указанием базирования, закрепления и настройки;
3) предложите вариант настройки контрольно-сортировочного
автомата;
4) проведите обоснованный выбор измерительного преобразователя линейных перемещений, поясните его конструкцию, принцип действия и схему включения;
5)предложите варианты загрузочных устройств с механической выдачей деталей; контрольно-сортировочного
автомата;
21. Шарики
подшипников 5h8 изготавливаются из стали ШХ15 и проходят термообработку на
зернистый перлит.
Разработайте
автоматизированную контролирующую систему качества термообработки шариков с
сортировкой на годные и брак, для чего:
1) Предложите
структурную схему автоматизированной контролирующей системы качества
термообработки.
2) Поясните
физический принцип контроля структуры материала с использованием вихревых токов.
3)
Разработайте принципиальную схему измерительной позиции, поясните принцип
действия измерительного преобразователя.
4)
Предложите конструкцию загрузочного органа бункерного типа с механизмом
поштучной выдачи шариков, обоснуйте технологичность конструкции.
22. Предложите
и обоснуйте основные принципиальные решения системы индикации и управления
высотой полета самолета. Система должна обеспечивать сравнение с погрешностью,
не превышающей 10', текущей и заданной информации о барометрической высоте и
управление исполнительным устройством при следующих параметрах нагрузки:
статический
момент, Нм 5
момент
инерции, кг.м2 0,05
скорость,
рад/с 10
ускорение,
рад/с2 2
Предлагаемые
решения должны содержать:
1) расчет мощности и выбор типа исполнительного устройства;
2) выбор типа измерителя рассогласования и схемы его включения;
3) выбор типа и обоснование схемы построения усилительно-преобразовательного устройства;
4) структурную схему системы с обоснованием принятых при ее составлении решений;
5) математическую модель динамических процессов в системе;
6) параметры, определяющие устойчивость и качество управление в переходных режимах;
7) обоснование необходимости использования корректирующих устройств, для
повышения качества работы системы;
8)предложения по компоновке системы.
23. Предложите и обоснуйте основные принципиальные решения по созданию
системы автоматического контроля и управления углом поворота антенны РЛС.
Система должна обеспечивать сравнение со статической погрешностью не
превышающей 15' текущей и заданной информации о положении антенны и управление
исполнительным устройством, при следующих максимальных значениях
параметров движения антенны:
статический момент, Н-м 5 • 104
момент инерции, кгм2 3 • 104
скорость, рад/с 0,05
ускорение, рад/с2 0,5
Предлагаемые
решения должны содержать:
1) расчет мощности и выбор типа исполнительного устройства;
2) выбор типа измерителя рассогласования и схемы его включения;
3) выбор типа и обоснование схемы построения усилительно-преобразовательного устройства;
4) структурную схему системы с обоснованием принятых при ее составлении решений;
5) математическую модель динамических процессов в системе;
6) параметры, определяющие устойчивость и качество управление в переходных режимах;
7) обоснование необходимости использования корректирующих устройств, для повышения качества работы системы;
8) предложения по компоновке системы.
24. Предложите и обоснуйте основные принципиальные решения по созданию системы дистанционного измерения интенсивности ионизирующих излучений с автоматической компенсацией погрешности в режиме реального времени.
Система должна обеспечивать погрешность не более 10'', при следующих максимальных значениях параметров нагрузки:
статический момент, Нм 5 0
момент инерции, кгм2 25
скорость, рад/с 0,1
ускорение, рад/с2 0,2
Предлагаемые
решения должны содержать:
1) расчет мощности и выбор типа исполнительного устройства;
2) выбор типа измерителя рассогласования и схемы его включения;
3) выбор типа и обоснование схемы построения усилительно-преобразовательного устройства;
4) структурную схему системы с обоснованием принятых при ее составлении решений;
5) математическую модель динамических процессов в системе;
6) параметры, определяющие устойчивость и качество управление в переходных режимах;
7) обоснование необходимости использования корректирующих устройств, для повышения качества работы системы;
8) предложения по компоновке системы.
25. Предложите и обоснуйте систему автоматического управления полетом
летательного аппарата по курсу с подробной разработкой контура стабилизации
режима полета.
Система должна обеспечивать погрешность не более 5'', при следующих максимальных значениях параметров нагрузки:
статический момент, Нм 500
момент инерции, кгм2 200
скорость, рад/с 0,1
ускорение, рад/с2 00,1
Предлагаемые
решения должны содержать:
1) расчет мощности и выбор типа исполнительного устройства;
2) выбор типа измерителя рассогласования и схемы его включения;
3) выбор типа и обоснование схемы построения усилительно-преобразовательного устройства;
4) структурную схему системы с обоснованием принятых при ее составлении решений;
5) математическую модель динамических процессов в системе;
6) параметры, определяющие устойчивость и качество управление в переходных
режимах;
7) обоснование необходимости использования корректирующих устройств, для
повышения качества работы системы;
8) предложения по компоновке системы.
26. Для
системы регистрации величины трещины в железобетонной опоре моста, включающей в себя по восемь преобразователей линейных
перемещений с дискретностью отсчета — 0,001 мм по каждой из трех координат, обеспечивающей циклический опрос всех преобразователей
по каждой из координат, передачу информации в центральную ЭВМ и последующую её обработку:
1) Предложите функциональную схему всей системы и платы
микроконтроллера.
2) Обоснуйте
выбор преобразователей линейных перемещений и предложите конструкцию их
крепления.
3) Обоснуйте выбор интерфейса для передачи информации
в центральную ЭВМ.
4) Предложите алгоритм работы микроконтроллера.
27.
Метеорологический многофункциональный прибор измеряет следующие параметры: атмосферное
давление воздуха, мм рт. ст. — 600 ÷ 800 с дискретностью 1 мм рт. ст.; температуру воздуха от -40°С до +60°С с дискретностью 1 °С; относительную влажность
воздуха в % с дисrретностью 1%; скорость ветра, м/с — 0 ÷ 60 с дискретностью 1
м/с. Для данного прибора:
1) Предложите функциональную схему прибора и платы
микроконтроллера.
2) Обоснуйте выбор преобразователей и предложите конструкцию их
крепления.
3) Предложите
и обоснуйте выбор интерфейса для передачи информации в центральную ЭВМ.
4) Предложите
конструкцию прибора.
28.
Система автоматизированного управления микроклиматом теплиц (САУ МКТ) предназначена
для поддержания заданных графиков температуры воздуха, температуры грунта, концентрации двуокиси углерода (СО2) и
влажности воздуха в теплице. Поддержание заданных параметров
обеспечивается путем автоматического управления мощностью системы обогрева, положением форточек, пуском/остановом вентиляторов
и газогенераторов.
1) Предложите структурную схему САУ МКТ
2) Обоснуйте выбор первичных преобразователей измеряемых параметров.
3) Предложите
кинематическую схему редуктора поворота форточки с возможностью установки датчика положения и обоснуйте его выбор.
4) Предложите
и обоснуйте выбор интерфейса для передачи информации между блоками системы и центральной ЭВМ.
29.
Система контроля и регистрации величины тока в обмотках электродвигателей
мельничных машин (24 единицы оборудования) предполагает постоянный опрос
датчиков с сохранением информации о силе
тока в течение суток и вывод информации о превышении допустимой величины
на дисплей.
1) Предложите
структурную схему системы контроля.
2) Обоснуйте
выбор датчиков тока.
3) Предложите
и обоснуйте выбор интерфейса для передачи информации между блоками системы и центральной ЭВМ.
4) Предложите алгоритм работы системы.
5) Проанализируйте
возникающие погрешности и предложите способы их устранения или минимизации.
4. Литература.
1. Ананченко В.Н.,
Гофман Л.А. Теория измерений. - Ростов н/Д, 2002
2. Конструирование
приборов: В 2-х кн. Под.ред. В.Краузе,-М., Машиностроение, 1987.
3. Попов В.Б.Основы компьютерных технологий.- М.:
Финансы и статистика, 2002.
4. Информатика: Учебник. – 3-е изд. / Под ред. Н.В.
Макаровой. - М.: Финансы и статистика, 2002.
5. Компьютерные сети.
Принципы, технологии, протоколы / В.Г. Олифер, Н.А. Олифер. – СПб: Питер, 2001.
6. Дьяконов В. Matlab: учебный курс. – СПб:
Питер, 2001
7. Плис А.И. MathCAD 2000 математический справочник для экономистов и инженеров. – М.: Финансы и статистика
8. Михальчук В.М., и др. Микропроцессоры 80x86 Pentium Архитектура, функционирование, программирование, оптимизация кода. – Минск «Битрикс», 1994
9. Томкинсон У., Уэйспор Дж. Сопряжение датчиков и устройств ввода данных с компьютерами IBM PC.- М.: Мир 1992
10. Приказчиков
А.Р., Лукьянова Т.П. Теория и пректирование элементов приборных систем: Учеб.пособие,
Рост н.Д, 1990.
11. Атамалян Э.Г.
Приборы и методы измерения электрических величин.- М., Высшая школа, 1989.
12. Вострокнутов
Н.Н. Цифровые измерительные устройства. -М., Энергоатомиздат, 1990
13. Новоселов О.Н.
Фомин А. Ф. Основы теории и расчета информационно-измерительных систем. -М.,
Машиностроение, 1991
14. Балашов Е.П.
Проектирование информационо-управляющих систем.-М., Радио и связь, 1987
15. Анурьев В.И.
Справочник конструктора – машиностроителя. В 3-х т. –М.: Машиностроение, 2001.
16. Конструирование машин: Справочно-методическое
пособие: в 2-х т./ Под ред. Фролова К.Ф.-М.: Машиностроение.- 1994.
17. Справочник конструктора точного приборостроения/
Г.А. Веркович, Е.Н. Головенкин, В.А. Голубков и др. – Л.:Машиностроение, 1989.
18. Иванов Ю.Н. Основы методологии конструирования
приборов точной механики: Учеб. Пособие /РИСХМ.-Ростов-н/Д. –1989.
19. Романычева Э.Т. и др. Разработка и оформление
конструкторской документации РЭА: Справочник/ Под ред. Романычевой Э.Т.- М.:
Радио и связь, 1989
20. Ерофеев А.А. Теория автоматического управления. –
М., Высшая школа, 2001
21.
Норенков И.П. Основы автоматизированного проектирования: Учебник.
- М.: Издательство МГТУ имени Н. Э. Баумана, 2002.
22. Плис А.И. Анализ и синтез систем управления. Теория. Методы.
Примеры решения типовых задач с использованием персонального компьютера.
Гданьск, Санкт Петербург, 1998
23. Единая система программной документации. – М.:
Издательство стандартов, 1994
24. Литвин А.В., Ананченко А.И. Автоматизация конструкторского
проектирования элементов машин и приборов: Учеб. пособие. – Ростов н/Д:
Издательский центр ДГТУ, 2002.
25. Гусев В.Г., Гусев В.М. Электроника. -:Высшая
школа, 1991
26. Цифровая и вычислительная техника. Учебник для
вузов./ Э.В. Евреинов, Ю.Т. Бутыльский, М.А. Мамзелов и др.: Под редакцией Э.В.
Евренкова – М.: Радио и связь, 1991
27. Чернов В.Г. Устройства ввода – вывода аналоговой
информации для цифровых систем сбора и обработки данных. – М.: Машиностроение,
1998
28. Микропроцессоры: В 3-х кн. Кн. 1. Архитектура и
проектирование микроЭВМ. Организация вычислительных процессов: Учеб. для техн.
вузов/П. В. Нестеров, В. Ф. Шаньгин, В. Л. Горбунов и др.; Под ред. Л. Н.
Преснухина,- Мн.: Высшая школа, 1987.
29. Микропроцессоры: В 3-х кн. Кн. 3. Средства
отладки, лабораторный практикум и задачник: Учеб. для техн. вузов/Н. В.
Воробьев, В. Л. Горбунов, А. В. Горячев и др.; Под ред. Л. Н. Преснухина,- Мн.: Высшая школа, 1987.
30. Каган Б. М., Сташин В. В. Основы проектирования микропроцессорных
устройств автоматики. -М.: Энергоатомиздат, 1987.
31. Злобин В. К., Григорьев В. П. Программирование
арифметических операций в микропроцессорах. -М.: Высшая школа,
1991
32.
А.Г.Сергеев, В.В.Крохин. Метрология. Москва. Логос. 2000
33.
Левшина Е.С., Новицкий П.В. Электрические измерения физических величин. Измерительные преобразователи: Учеб. пособие для
вузов. - Л.:Энергоатомиздат. Ленингр. отд-ние, 1983
34. Чумаченко Ю.Т. Материаловедение Учеб. пособие для
вузов. - Ростов-на-Дону.: Феникс, 2007
35. Б.Н. Арзамасов Материаловедение
Учебник для вузов: Издательство МГТУ им.Баумана, 2005
36.
Системы автоматизированного проектирования :Учеб. Пособие для вузов: в 9 кн./под
ред. И. П. Норенкова - М.: Высша. шк., 1988
37.
Автоматизация проектирования устройств измерительной техники / Ю. М.Туз, А. И. Забарный,
Б. Н. Белоусов и др.- К.: Выща шк.,1988
38.
Фигурнов В.Э. IBM PC для пользователя. - Уфа, НПО "Информатика и
компьютеры", 1993
38.
Литвин А В., Ковалев АВ., Нестеренко И.Н. Автоматизированное конструирование
печатных плат. ДГТУ, Ростов н/Д: 1997
39.
Андросов А.А. Надежность технических систем /Учеб. пособие. Ростов - н/Д: ДГТУ,
2000.
40.
Рыжкин А.А. Основы теории надежности: Учеб. Пос. ДГТУ.-Ростов -н/Д, 2002
41.
Расчет и проектирование деталей машин /А.А. Андросов, Ю.Е. Андрющенко, А.Г.
Дьяченко и др.; ДГТУ; Под общ. Ред. А.А. Андросова. Ростов ~н/Д, 2002
42.
Анурьев В.И. Справочник конструктора -машиностроителя. В 3-х т., М.:
Машиностроение, 2001.
43. Заковоротный В.Л., Семко И.А. Электроме-ханические
системы: Учеб. пособие - Ростов н/Д: Издательский центр ДГТУ. 2000
44. Ананченко В.Н., Головкин В.В. Автоматический
контроль в ГАП: Учеб. пособие - Ростов н/Д: Издательский центр ДГТУ. 1996
45. Приборно-модульные универсальные автоматизированные
измерительные системы: Справочник/ В.А. Кузнецов и др. — М.: Радио и связь,
1993
46. Сопряжение датчиков и устройств ввода данных с
компьютерами IBM PC: Пер. с англ./Под ред. У.
Томпкинса, Дж. Уэбстера. - М.: Мир, 1992.
47. Якушенков Ю.Г. Теория и расчет оптико-электронных
приборов. — М.:Машиностроение, 1989
48. Лазарев Л.П. Оптико-электронные приборы наведения.
— М.:Машиностроение, 1989
Мосягин Г.М. и др. Теория оптико-электронных систем:
[Учеб. для втузов]/ Г.М. Мосягин, В.Б. Немтинов, Е.Н. Лебедев. — М.:Машиностроение,
1990
49. Куркин В.И., Козинцеов Б.С. Детали механизмов радиоустройств.-М.:
Высшая школа.-1988. |