(1)
(1) Современный уровень и дальнейшее развитие общественного производства неразрывно связаны с интенсификацией режимов работы машин и агрегатов, созданием автоматизированных комплексов технологического оборудования со многими исполнительными движениями. В этих условиях возникает проблема создания новых и совершенствовании действующих автоматизированных приводов, отвечающих все возрастающим требованиям.
Одним из перспективных направлений решения задачи является насыщение технологического оборудования системами гидропривода и гидропневмоавтоматики. Так, применение гидроприводов в металлообрабатывающем оборудовании позволяет упростить кинематику станков, улучшить массогабаритные характеристики, повысить быстродействие, точность, надежность и уровень автоматизации исполнительных механизмов.
Широкое использование гидропривода обусловлено его существенными преимуществами в сравнении с другими типами приводов и, прежде всего, возможностью получения больших усилий, крутящих моментов и мощностей при ограниченных габаритах гидродвигателей. Другие преимущества гидропривода: простота преобразования и передачи энергии, высокие удельная напряженность силового потока и динамические характеристики в переходных режимах, бесступенчатое регулирование скорости движения, автоматическая защита от перегрузок, высокая жесткость кинематических и нагрузочных характеристик, пожаробезопасность наиболее полно отвечают тенденциям развития техники и способствуют повышению ее эффективности.
Компактные энергоемкие гидродвигатели легко встраиваются в различные исполнительные механизмы, соединяются трубопроводами с гидроаппаратами и насосной установкой, имеющей один или несколько насосов, что открывает широкие возможности для автоматизации, контроля и оптимизации рабочих процессов, применения программных, адаптивных и мехатронных систем управления. Компоновка гидроприводов легко поддается модернизации, состоит главным образом из стандартных, унифицированных гидроаппаратов, серийно выпускаемых отечественными и зарубежными предприятиями по единому международному классификатору.
Гидроприводы имеют и недостатки, которые ограничивают их функциональные возможности в реальных проектах. Это потери на трение и утечки, снижающие КПД гидропривода и вызывающие нагрев рабочей жидкости. Внутренние утечки через зазоры в допустимых пределах полезны, поскольку улучшают условия смазки подвижных сопряжений и теплоотвода. Наружные утечки приводят к повышенному расходу масла, загрязнению гидросистемы и рабочего места и, как следствие, нарушению требований экологичности. Необходимость применения фильтров тонкой очистки для обеспечения требуемой надежности гидроприводов повышает стоимость последних и усложняет техническое обслуживание. Работоспособность гидросистем резко снижается при попадании воздуха и воды в минеральное масло. Изменение вязкости масла при его нагреве приводит к изменению скорости движения гидродвигателей.
В этих условиях важное значение приобретают методы поиска, расчета и проектирования рациональных схемотехнических решений гидро- и пневмоприводов, основанные на знаниях свойств и технических характеристик жидкости и газов, законов их поведения в гидропневмосистемах, емкостях и резервуарах. Понимание физической сущности гидромеханических процессов, грамотное их моделирование в инженерных задачах позволяет создавать высокоэффективные механизмы и машины на основе технических средств гидропривода и гидропневмоавтоматики при минимальных затратах времени и средств. Обобщенные подходы к изучению дисциплины «Гидравлика, гидропневмоавтоматика и тепловые процессы», анализу и синтезу схемотехнических решений гидропривода позволяют использовать полученные знания при разработке гидрофицированных технологических машин (станочные системы, кузнечно-прессовое, литейное и сварочное оборудование, технологическая оснастка, промышленные роботы, пищевое оборудование и др.), а также мобильной техники, в частности, – сельскохозяйственных и транспортных машин.
Пособие предлагает структурно-логическую схему изучения дисциплины, применения полученных знаний при проектировании гидрофицированной техники, рекомендуется студентам инженерных специальностей для курсового и дипломного проектирования по специальным дисциплинам. Материалы пособия полезны также инженерно-техническим работникам, занимающимся разработкой и обслуживанием гидрофицированной техники.
1. Цели и задачи дисциплины. Ее место в инженерной подготовке.
Цель изучения дисциплины - подготовка специалистов для производственной, конструкторской и исследовательской деятельности в области автоматизации технологических процессов и машин средствами гидропривода и гидропневмоавтоматики. Дисциплина направлена на развитие навыков анализа и синтеза схемотехнических решений, расчета и проектирования гидравлических и пневматических приводов исполнительных механизмов технологических машин. Объектами изучения являются гидравлические и пневматические устройства, системы гидропривода и гидропневмоавтоматики, применяемые в технологическом оборудовании, транспортирующих и ориентирующих устройствах, оснастке, роботах и манипуляторах. Основное внимание при изучении дисциплины должно быть направлено на:
На овладение знаниями:
- основных законов технической механики жидкости и газов, их применения в решении инженерных задач;
- принципов действия и основ функционирования различных устройств гидро- и пневмоприводов;
- основ схемотехнического поиска, расчета и проектирования гидро- и пневмоприводов;
-тенденций развития гидрофицированной техники, современных методов построения перспективных решений в области приводов и систем.
На овладение умениями:
- решать прикладные задачи инженерной гидравлики;
- по заданным техническим требованиям и результатам расчета выбрать элементную базу гидро- или пневмопривода;
- читать, анализировать и составлять принципиальные схемы приводов;
- определять и согласовывать основные характеристики элементов привода для обеспечения рациональных режимов его работы.
Основы дисциплины базируются на знаниях дисциплин: "Высшая математика", "Физика", ''Теория механизмов и машин", ''Теоретическая механика", "Основы конструирования машин", ''Моделирование технических систем'' и др.
Полученные знания используются в курсовом, а в дальнейшем, и дипломном проектировании при разработке гидро- или пневмоприводов основного и вспомогательного технологического оборудования, углубляются при изучении специальных дисциплин инженерной подготовки.
2. Рекомендации к изучению основных разделов дисциплины.
Структурно-логическую схему дисциплины образуют три раздела: гидравлика, гидропривод и гидропневмоавтоматика. Их изучение в указанной последовательности позволит сформировать знания, умения и навыки и применять их при анализе или синтезе технических решений гидрофицированной техники.
В этом разделе рассматриваются основные положения технической механики жидкости и газов, описываемые тремя блоками тем: гидростатика, гидрокинематика и гидродинамика жидкости и газа [1, 2].
Гидростатика рассматривает поведение жидкости и газа в условиях равновесия (абсолютного или относительного покоя) на основе дифференциальных уравнений Л. Эйлера. Интегрирование уравнений приводит к основному уравнению гидростатики, позволяющему определять абсолютное гидростатическое давление в любой точке выделенного объема жидкости, а также силы, действующие на плоские и криволиненийные поверхности. Эти знания представляют основу расчета емкостей и резервуаров, широко применяемых в инженерной практике.
Важным моментом здесь является понимание закона Паскаля, определяющего принципы преобразования силы, скорости, перемещения посредством рабочей жидкости в объемном гидроприводе.
Гидрокинематика изучает закономерности поведения потоков жидкости и газа без анализа сил, вызывающих их движение, предлагает расчетные зависимости для определения наиболее важных характеристик потока: скорость, расход, давление. Рассматривая общие свойства потока жидкости, необходимо обратить внимание на подходы Лагранжа и Эйлера к изучению движения жидкости.
При изучении режимов движения жидкости необходимо обратить внимание на физический смысл числа Рейнольдса при ламинарном и турбулентном движении потока.
В разделе гидродинамика ключевым является уравнение Бернулли для определения напора одномерного потока рабочей среды. Понимание геометрической и энергетической сущности трех его составляющих (скоростного, геометрического и пьезометрического напора) позволит рассчитывать давление на любом участке потока. Случай стационарного движения потока приводит к фундаментальному уравнению гидродинамики реального потока Бернулли. Оно позволяет рассчитывать характеристики потока реальной жидкости через отверстия и насадки и при известной площади ''живого'' сечения потока – расход вытекающей жидкости. Уравнение Бернулли применяется при решении многих практических задач, например, при расчете проточной части гидроаппаратов. Поэтому следует хорошо разобраться и запомнить основные уравнения этого раздела, позволяющие рассчитывать статические расходно-регулировочные характеристики управляющих устройств.
Из уравнения Бернулли для реального потока жидкости следуют основные представления о гидравлических сопротивлениях (линейных и местных), расчет которых выполняется по уравнению Дарси-Вейсбаха.
В заключительной теме раздела рассматриваются основы расчета простых и разветвленных гидромагистралей, потребного напора, насосной подачи и рабочей точки гидросистемы.
Раздел посвящен объемному гидравлическому приводу, представляющему совокупность технических устройств, связанных между собой посредством жидкости или газа (пневмопривод) для выполнения различных исполнительных движений механизмов и машин. При изучении этого раздела необходимо выделить достоинства и недостатки гидро- и пневмоприводов, устройство и принцип действия источников питания, гидродвигателей, регулирующей, распределительной и вспомогательной аппаратуры [1, 3, 4]. Особое внимание следует обратить на способы регулирования скорости привода: дроссельный и объемный, их сравнительный анализ, приемы стабилизации скорости при переменной нагрузке в приводе, а также синхронизации движения группового гидропривода, работающего от одного насоса. При изучении управляющих устройств важно понять принципы построения гидравлических и пневматических усилителей мощности на основе золотника, струйной трубки, сопло-заслонки, изучить их основные характеристики (коэффициент усиления, добротность) [1, 9]. Основным вопросом здесь является связь между расходом, давлением жидкости, формой, параметрами проточной части рабочих окон различных управляющих устройств. Их многообразие, различные способы управления реализуются в программном, следящем и шаговом гидроприводах, каждый из которых имеет свои особенности, во многом определяющие выбор типа и стратегию проектирования привода. Учитывая широкое применение в автоматизированном технологическом оборудовании следящего привода, необходимо изучить устройство, типовые варианты гидравлических и пневматических следящих приводов с механическими, электрическими, гидравлическими обратными связями [3, 5, 10].
Гидропневмоавтоматика (ГПА) рассматривает законы сбора и переработки информации, формируемой потоками жидкости или газа для управления гидропневмосистемами по заданному закону, предлагает способы и технические средства автоматизации процессов и машин [4].
Системы ГПА широко применяются как для решения силовых задач (автоматизированный гидропневмопривод), так и выполнения функций управления технологическими процессами, машинами и агрегатами. Раздел "Пневматические приводы", описывающий силовые приводы не рассматривается отдельно, так как его основы базируются на знаниях раздела "Гидравлические приводы". Поэтому при проработке этого материала рекомендуется опираться на общие положения обоих разделов, акцентируя внимание на особенностях применения газа в качестве рабочей среды. Их понимание основывается на фундаментальных уравнениях состояния газа Менделеева-Клайперона.
Изучение принципов построения клапанных, мембранных, струйных элементов ГПА, анализ их типовых устройств позволит рассматреть унифицированные системы элементов гидропневмоавтоматики – СЭГРА, УСЭППА, Волга и др., возможности выполнения на их элементной базе функций управления, логических и вычислительных операций в одно- и многотактных релейных схемах управления [4, 8, 12].
Перспективным направлением развития ГПА является создание на ее элементной базе приводов, измерительной техники [3, 9, 11]. Это подтверждается многообразием приборов, контрольно-измеритетельных устройств, построенных на различных гидрогазодинамических эффектах для измерения линейных размеров, температуры, расходов, давлений, скорости и др. [4] Основные из них должны быть рассмотрены при изучении этого раздела.
При изучении дисциплины необходимо выделить сложные в понимании вопросы и получить соответствующие консультации на кафедре. В целях самопроверки усвоения материала полезно решить типовые задачи, предлагаемые программой [2], пройти компьютерное тестирование в вычислительном классе кафедры.
Заключительным этапом изучения лекционного курса является систематизация, обобщение и закрепление полученных знаний, выполнением лабораторного практикума, курсового проектирования и итоговая аттестация в виде экзамена.
Изучение теоретического курса сопровождается выполнением лабораторных работ. Для каждой лабораторной работы предлагаются методические указания, в которых указаны цель задачи, даны основные теоретические положения, описание лабораторной установки, методика проведения работы и оформления отчета. При подготовке, выполнении лабораторных работ, защите отчетов следует уделить внимание пониманию сущности протекающих процессов, руководствоваться методическими указаниями и рекомендованной литературой.
Конкретные цифровые значения исходных данных для выполнения работы даются руководителем занятий. При обработке результатов эксперимента размерности физических величин приводятся в системе СИ.
По всем выполненным работам каждый студент должен представить отчет, составленный по форме, определяемой методическими указаниями. Важным разделом отчета является анализ результатов и конкретные выводы. Защита отчетов проводится по мере выполнения работ.
При положительной оценке выполненных работ студент получает кафедральный зачет по лабораторному практикуму.
4. Методические указания к курсовому проектированию.
Курсовая работа имеет целью закрепление знаний, развитие схемного мышления, навыков поиска схемотехнических решений, составления схем, выполнения расчетов, основных этапов проектирования гидравлических и пневматических приводов, выбора рациональной элементной базы гидросистем, анализа полученного решения по основным критериям качества гидропривода.
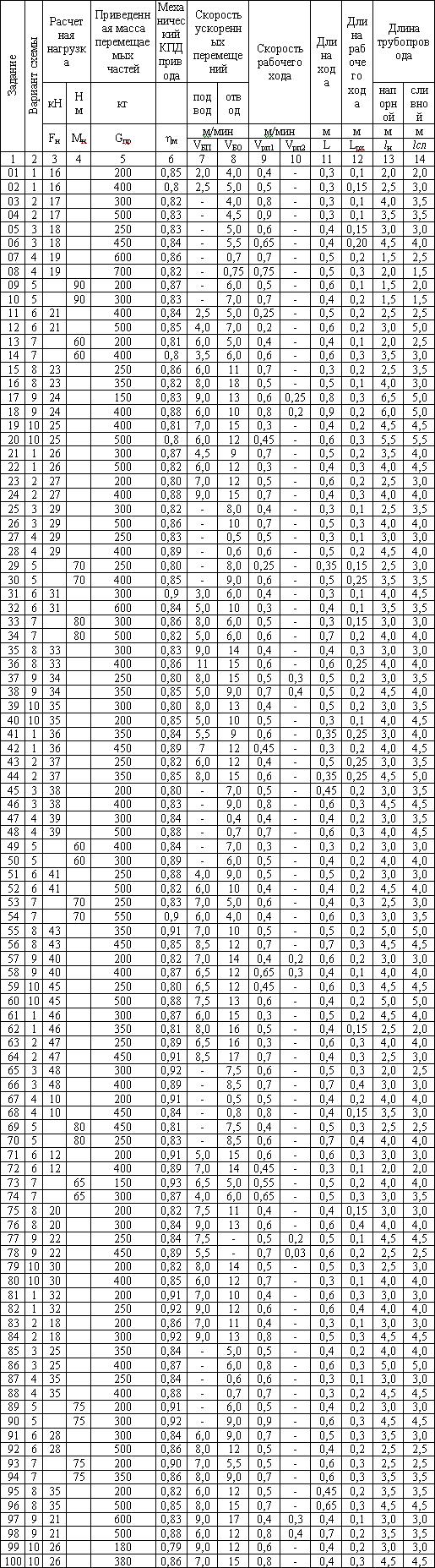
Задание на курсовую работу предполагает разработку силового гидро- или пневмопривода технологического оборудования по заданным исходным данным. Для разработки привода задается один из десяти объектов гидрофикации (таблица П1), приводятся закон движения рабочего органа (рабочий цикл) и технические требования к проекту (см. Приложение).
В таблице 5 предлагаются исходные данные для расчета привода. Номер задания курсовой работы (проекта) соответствует двум последним цифрам номера зачетной книжки студента. В графе ''2'' таблицы указан вариант исполнительного механизма (таблица П1), для которого должен быть разработан автоматизированный гидропривод.
4.1 АНАЛИЗ ОБЪЕКТА ГИДРОФИКАЦИИ, ВЫБОР ГИДРОПРИВОДА.
Конструкция гидропривода во многом определяется служебным назначением технологического оборудования. Поэтому его разработку следует начинать с краткого анализа объекта гидрофикации, его рабочей зоны и состава исполнительных движений, выделить и описать в таблице П1 исполнительный механизм (ИМ). На этом этапе определяется направление поиска схемотехнического решения привода, обосновывается применение гидропривода, формируются основные технические требования к проекту [3, 7, 8].
В техническом задании на разработку привода предлагается рабочий цикл ИМ металлообрабатывающего станка. Основными критериями выбора гидропривода являются его преимущества в сравнении с электро- и пневмоприводами. Здесь же принимается способ управления приводом и контроля правильности выполнения элементов рабочего цикла. Задачи такого класса рекомендуется решать применением циклового управления (с контролем движения по пути, давлению или времени) [5, 11].
При простом и надежном цикловом управлении с контролем по пути команда на выполнение очередного элемента цикла поступает от средств путевого контроля после выполнения предыдущего перехода, например, воздействием программно выставляемого на подвижной части ИМ упора на осевые пилоты, конечные выключатели или применением датчиков перемещения [5, 9]. При контроле движения по давлению переключение осуществляется с помощью команд от реле давления. Этот метод часто применяется при работе по жестким упорам. Контроль во времени применяется в случаях, когда время выполнения элемента цикла регламентируется техпроцессом обработки, например, выдержка на упоре в конце рабочего хода инструмента.
Результатом этого этапа работы является составление на основе расчетной схемы ИМ (Таблица П1) его полуконструктивной схемы с указанием элементов задания и контроля рабочего цикла (упоры, конечные выключатели, осевые пилоты). При этом на схеме указываются основные кинематические, силовые, геометрические параметры исполнительного механизма и гидродвигателя.
4.2 СОСТАВЛЕНИЕ ЦИКЛОГРАММЫ РАБОТЫ ПРИВОДА.
Пример циклограммы типового рабочего цикла привода подачи для агрегатной головки представлен в таблице 1. При составлении циклограммы допускается пренебрегать временем разгона t р , реверсирования t рев , торможения t т рабочего органа, так как для предлагаемого технологического оборудования, как правило,
t р + t т << t у ,
где t у – время установившегося движения на участке рабочего хода
(1)
где u рп , L рп – скорость и величина рабочего хода
Длительность элемента цикла «Стоп» определяется временем загрузки станка t З и принимается по нормативам (2-6с), время задержки (выдержки на упоре) t зд = 1 – 3 с [6, 13].
По составляющим временной циклограммы определяется время цикла Т ц (для рассматриваемого примера Т ц = 40 с).
Таблица 1
Временная циклограмма

4.3 РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ СХЕМЫ ГИДРОПРИВОДА.
Типы гидросхем и общие требования к их исполнению регламентирует ГОСТ 2.701-76 ''Схемы. Виды и типы. Общие требования к выполнению'', ГОСТ 2.704-76 ''Правила выполнения гидравлических и пневматических схем'' [17, 18].
4.3.1 Анализ элементной базы гидропривода
Выполняя анализ предлагаемый заданием элементной базы привода, определяют назначение, функциональные возможности каждого из устройств, выделяют особенности их применения в схемах. Символическое и буквенное обозначения, содержание анализа устройств приводятся в пояснительной записке. Каждое устройство имеет свое буквенно-цифровое позиционное обозначение [18]:
У – устройство; РУ – регулирующее устройство; ГА – аккумулятор; Б – бак; РВ – резервуар; ГД – гидродвигатель поворотный; ДП – делитель потока; ДР – дроссель; ГЗ – гидрозамок; К – клапан; КД – гидроклапан давления; КО – обратный клапан; КП – клапан предохранительный; КР – клапан редукционный; ГМ – гидромотор; М – манометр; Н – насос; НП – насос нерегулируемый; НР – насос регулируемый; Р – распределитель; РД – реле давления; РП – регулятор расхода (потока); Ф – фильтр; ГЦ – цилиндр; ТПО – теплообменник (охладитель-нагреватель).
Группе одинаковых элементов присваивают порядковые номера Р1, Р2, Р3, Р4,…
4.3.2 Разработка функциональной и структурной схем гидропривода
Даже при известной элементной базе привода составление принципиальной схемы вызывает затруднения, требует значительных затрат времени. Задача упрощается предварительной разработкой функциональной и структурной схем [18]. При этом выясняются условия взаимодействия и взаимной связи гидроаппаратов, что позволяет объединить их в основные функциональные блоки, определить структуру принципиальной схемы.
Пример обобщенной функциональной схемы представлен на рис. 1, структурной – на рис. 2. На этих схемах блоки и устройства представляют в виде прямоугольников с буквенно-цифровым обозначением гидроаппаратов по п. 4.3.1 (рис. 2), соединяют их прямыми и обратными связями и формируют функциональные блоки:
ЭСУ – энергосиловая установка обеспечивает формирование потока рабочей среды с требуемым давлением Р Н , расходом Q H , поддержание рационального теплового режима Т и эксплуатационных свойств рабочей среды, основные их которых степень очистки d , ограничение объема растворенного в жидкости воздуха V B , наличие конденсата в сжатом воздухе и др. Для пневмопривода ЭСУ – представляет узел подготовки воздуха (УПВ). Кроме того, ЭСУ обеспечивает автоматическую защиту привода от перегрузки, разгрузку системы от давления в периоды пауз в работе ГД при работающем насосе.
РС – рабочая среда (жидкость или воздух) обеспечивает передачу энергии от источника питания к гидродвигателю, отвод тепла и продуктов износа из гидро- или пневмосистемы, надежную смазку подвижных сопряжений в гидроаппаратах и механизмах.
ГПЛС – силовые и управляющие гидравлические и пневматические линии связи аппаратов в гидро- или пневмосистемах.
БУС – блок управления скоростью движения выходного звена гидродвигателя.
БП – блок позиционирования, предназначен для изменения направления движения гидродвигателя, останова, в том числе с требуемой точностью позиционирования и фиксации ГД или исполнительного механизма, разгрузки исполнительного механизма от воздействия позиционной нагрузки, например, от веса вертикально или наклонно перемещающихся частей привода.
ГД – гидродвигатель – преобразователь энергии потока рабочей среды в поступательное, или вращательное движение исполнительного механизма с заданной скоростью v или w , силой F или крутящим моментом М.
ИМ – исполнительный механизм обеспечивает основное или вспомогательное движение рабочего органа машины в процессе работы.
СУ – система управления обеспечивает регулирование параметров привода и управления законом движения исполнительного механизма.
ППМ – передаточно-преобразующий механизм, обеспечивает согласование кинетики движения выходного звена ГД и рабочего органа машины, включает редукторы, передачи винт-гайка, шестернь-рейка, тормозные устройства.
Взаимодействие блоков отражают функциональные связи, выполненные линиями и стрелками.


На основе функциональной и структурной схемы в дальнейшем выполняется принципиальная схема.
4.3.3 Составление принципиальной схемы
При составлении принципиальной схемы кроме установленных функциональных связей между элементами учитываются требования техники безопасности, возможные нарушения в работе гидрооборудования (случайные падения давления, сгорание обмотки электромагнита, засорение малых отверстий и др.). Вводятся блокировки, исключающие возможность несовместимых движений, падения вертикально расположенных исполнительных механизмов, расфиксации заготовки или инструмента, включения движения при отсутствии смазки и т.п. Особое внимание следует уделить ограничению потерь мощности в гидросистеме. Известно, что поддержание теплового режима гидропривода, в котором имеются значительные потери мощности (вследствие дросселирования потока, наличия линейных и местных сопротивлений) – весьма сложная техническая задача, требующая существенного увеличения объема бака или применения системы принудительного охлаждения [10].
При разработке привода целесообразно использовать специальные приемы сокращения потерь мощности [10]:
• секционная работа двух нерегулируемых насосов, например, с трехскоростной гидропанелью Г33-1;
• применяют два однопоточных нерегулируемых насоса с разделительной панелью Г 53-2, обеспечивающей совместную (параллельную или последовательную) или раздельную их работу на отдельных этапах рабочего цикла привода;
• в периоды пауз при работающем насосе, например, в положении ''Стоп'' разгружают гидросистему от давления с помощью предохранительного клапана непрямого действия с электрическим управлением разгрузкой;
• применяют гидроаккумуляторы для рекуперации энергии потока насоса [1, 10];
• используют наиболее экономичные схемы дроссельного регулирования скорости, например, установкой дросселя в ''параллель'' или регулятора потока МПГ 55-1 с предохранительным клапаном;
• заменяют дроссельное регулирование скорости объемным (машинным);
• выбор параметров насоса осуществляют с минимальным запасом по расходу и давлению.
На принципиальных схемах гидропривода (пример на рис. 3.) элементную базу представляют в виде условных символических обозначений [19, 20, 21]. Их расположение на схеме должно примерно соответствовать пространственному размещению в приводе. При вычерчивании условных обозначений гидродвигателей и аппаратуры рекомендуется придерживаться определенного масштаба (диаметры цилиндров, величины хода и др.). Все устройства следует показывать в положении, соответствующем исходному состоянию гидродвигателя.
Позиционные буквенные обозначения устройств располагаются справа и сверху условно-графического обозначения элемента.
Принципиальная схема составляется соединением устройств условными гидролиниями связи, реализующими заданный закон движения гидродвигателя. Исполнение схемы должно обеспечивать удобство чтения и понимание взаимных связей гидроаппаратов. Поэтому число пересечений гидролиний должно быть минимальным.
Всем линиям связи присваиваются порядковые номера 1, 2, 3,…, как правило, в направлении движения потока; дренажные линии для отвода утечек нумеруются в последнюю очередь. Номера обычно проставляются около двух концов линий.
К принципиальной схеме составляется перечень элементов (спецификация), включающий позиционные обозначения, наименование, тип и количество элементов системы. В примечании указываются основные параметры (рабочее давление, расход, размеры гидродвигателей, скорости движения и др.). Однотипные элементы записываются в одну строку (например, распределители Р1…Р4). Кроме перечня элементов, рядом с принципиальной схемой приводится циклограмма работы привода.
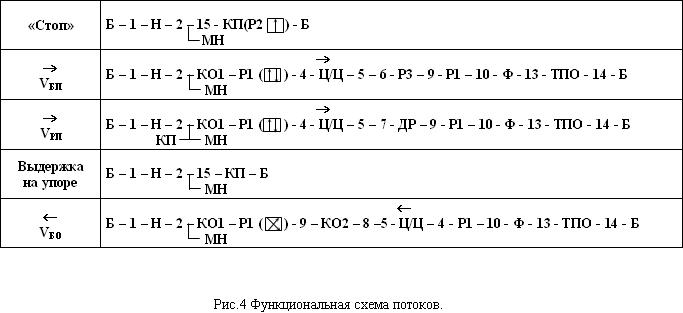
Для проверки правильности составления принципиальной схемы и краткого описания ее работы составляют функциональную схему потоков, поясняющую направление движения рабочей жидкости в гидросистеме при выполнении каждого элемента рабочего цикла (см. рис. 4) и работу схемы.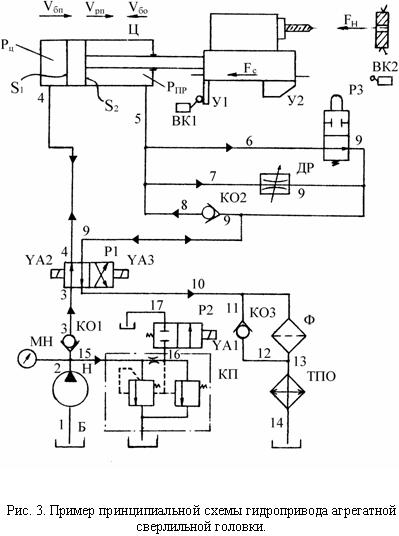
4.4 ПОЛНАЯ ЦИКЛОГРАММА РАБОТЫ ГИДРОПРИВОДА.
Предлагаемые заданием законы движения привода могут выполняться программным гидроприводом. Последовательность выполнения элементов рабочего цикла в таких приводах обеспечивают программно выставляемые упоры, конечные выключатели, реле давления, времени, датчики давления. Они должны быть показаны на принципиальной схеме в соответствии с заданным циклом. Пример циклограммы работы привода на рис. 3 представлен таблицей 2.
Таблица 2
Циклограмма работы гидропривода агрегатной головки.

Структурная и принципиальная схемы, спецификация, полная циклограмма и функциональные схемы потоков выполняются на первом листе графической части курсовой работы (проекта) (формат А1).
4.5.1 Расчет параметров и выбор гидродвигателя
4.5.1.1 Для приводов с гидроцилиндром давление в рабочей полости р ц предварительно принимают по максимальной расчетной нагрузке F нм в таблице 3.
Таблица 3.

В общем случае максимальная нагрузка F нм , преодолеваемая силовым цилиндром, определяется уравнением сил, действующих на выходное звено гидроцилиндра. Для гидроцилиндра:
![]() , (2)
, (2)
где F рез – составляющая силы резания или полезной нагрузки, совпадающая с направлением подачи;
F с – сила вредных сопротивлений;
G – вес перемещаемых узлов при вертикальном расположении цилиндра;
F и = m пр ? a – сила инерции перемещаемых масс;
где: m пр – приведенная к выходному звену гидродвигателя масса перемещаемых частей;
a – ускорение (исходя из допускаемых динамических нагрузок a max = 4 ? 6 м ? c -2 (для линейных движений), a max = 1200 ? 1600 рад ? c -2 (для вращательных движений)) [5, 6].
Сила вредных сопротивлений F с определяется или принимается из (4.2)
![]() , (3)
, (3)
где F ц – сила трения в уплотнениях поршня и штока, в дальнейшем учитывается механическим КПД цилиндра h м (~ 0.85 – 0,9) [10];
F н – сила трения в направляющих рабочего органа станка (стола, суппорта);
F пр = р пр ? S ц – сила противодавления (р пр – противодавление, S ц – площадь поршня со стороны сливной полости цилиндра).
Используя (2–3), определяют расчетные нагрузки F н i на каждом элементе рабочего цикла (при быстром подводе t бп , рабочем ходе t рп , быстром отводе t бо и др.) По наибольшей из них F нм принимают величину максимального рабочего давления в рабочей полости цилиндра р ц (таблица 3).
Исходя из F нм и р ц , определяют эффективную площадь S и диаметр поршня D цилиндра
![]() , (4)
, (4)
![]() , (5)
, (5)
Расчетное значение D округляют до ближайшего стандартного (ГОСТ 12447-80): 25, (28), 32, (36), 40, (45), 50, (56), 60, (70), 80, (90), 100, (110), 125, … мм. Значения в скобках не являются предподчтительными. По принятому значению D уточняют S и максимальное рабочее давление в цилиндре
 , (6)
, (6)
Аналогично по F н i и S определяют рабочие давления в цилиндре для остальных элементов рабочего цикла ( t з , t бп , t Рп , t бо ).
4.5.1.2 Для приводов с гидромотором по расчетному крутящему моменту М н (таблица 5) предварительно принимают тип гидромотора [10, 14] и рассчитывают величину максимального перепада давления на нем D р д (на участке рабочей подачи)
 , (7)
, (7)
где q д – рабочий объем принятого типоразмера гидромотора или расход за один оборот ротора (согласно ГОСТ 13824-80 (СТ СЭВ 525-77)) q д регламентируются стандартным рядом: 4; 5; 6,3; 8; 10; 12,5; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125; 160…см 3 ? об -1 ;
h м – механический КПД гидромотора (0,85 – 0,9) [10, 13].
На участках быстрых перемещений крутящий момент гидромотора М бп меньше расчетного М н , определяется действием момента сил от вредных сопротивлений М с и принимается равным М бп = (0,15 ? 0,2)М н [3, 7]. По М бп рассчитывают перепады давления на гидромоторе при быстром подводе и отводе исполнительного механизма.
Для определения частот вращения вала гидромотора n д на каждом элементе рабочего цикла используем уравнение кинематического баланса, устанавливающего связь между перемещениями начального и конечного звеньев привода (последние заданы исходными данными задания)
V = n д · u · t в , V = n д · u · p · m · z (8)
где: u – передаточное отношение редуктора;
t в – шаг винта передачи винт-гайка;
m , z – модуль, число зубьев передачи шестерня-рейка.
По уравнению (8) рассчитывают частоты вращения вала гидромотора n д для каждого элемента рабочего цикла
![]() ,
, ![]() (9)
(9)
По расчетным значениям n д max , n д min , D р, М н окончательно уточняется q д и принимается тип гидромотора [10].
4.5.1.3 Для привода с гидроцилиндром после определения D рассчитывают диаметр штока D ш . При этом учитывается коэффициент K V соотношения скоростей обратного ускоренного и прямого рабочего хода поршня при постоянном, подводимом к цилиндру расходе
 , (10)
, (10)
При обычной схеме подключения одноштокового цилиндра
 . (11)
. (11)
При дифференциальной схеме, обеспечивающей соединение обеих полостей цилиндра между собой и с напорной линией и перекрытие слива
 , (12)
, (12)
Если соотношение скоростей не регламентируется,
D ш = (0,25 / 0,25) D – в обычных случаях
D ш = (0,4 / 0,5) D – для мощных систем
Расчетное значение D ш округляется до ближайшего стандартного (ГОСТ 12447-80). Принятые значения D , D ш , L M , h M позволяют выбрать типоразмер и конструкцию гидроцилиндра по нормали Г21-19 [10, 13].
4.5.2 Расчет параметров и выбор насоса
4.5.2.1 По заданным скоростям ускоренных перемещений V бп , V бо и рабочих перемещений V рп1 , V рп2 исполнительного механизма определяются требуемые расходы в напорной и сливной гидролиниях гидродвигателя.
Для привода с гидроцилиндром
При рабочей бесштоковой полости одноштокового цилиндра:
Напорная гидролиния Q ц н Сливная гидролиния Q ц сл
![]() ;
; ![]() (13)
(13)
![]() ;
; ![]()
Для симметричного двухштокового цилиндра
При рабочей штоковой полости цилиндра: ![]()
Напорная гидролиния Сливная гидролиния
![]()
![]()
![]() (14)
(14)
![]()
![]()
![]() ;
;
Для привода с гидромотором с рабочими объемами q О напорной и сливной полостей
![]() ; (15)
; (15)
 ; (16)
; (16)
![]() ; (17)
; (17)
где n бп , n бо , n рп – частоты вращения гидромотора при ускоренных и рабочих перемещениях;
h о – объемный КПД принятого типоразмера гидромотора.
4.5.2.2 Подачу (производительность) насоса постоянной производительности рассчитывают по уравнению:
![]() (18)
(18)
где Q max – максимальный из рассчитанных в п. 4.5.2.1 расходов;
S Q yi – суммарные объемные потери в гидроаппаратуре предлагаемой схемы привода;
Q кл – расход масла через предохранительный клапан, необходимый для обеспечения устойчивой работы привода ( Q кл = 3 ? 4 л/мин) [5, 10];
n – количество гидроаппаратов на напорной гидролинии привода.
Объемные потери в гидроаппаратах определяются по уравнению:
![]() (19)
(19)
где r ГА – удельная утечка (ориентировочно для гидроаппаратуры r ГА = 0,017 см 3 /(МПа ? с), гидроцилиндра r ц = (0,034 ? 0,05) см 3 /(МПа ? с), гидромотора ч д = (0,8 ? 1,2) см 3 /(МПа ? с) [10 ,14];
р ц i – максимальное рабочее давление в гидродвигателе (при рабочих подачах с F HM ).
По расчетному значению Q н из (18) принимается ближайшее большее значение из стандартного ряда расходов (л/мин):…4; 5; 6,3; 8; 10; 12,5; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125;… (ГОСТ13825-80), (СТ СЭВ 520-77).
Используя (19), определяем утечки и для других этапов рабочего цикла.
4.5.2.3 Потребное наибольшее давление, развиваемое насосом, рассчитывают по уравнению (20):
![]() (20)
(20)
где S D р ап – суммарные потери давления в гидроаппаратуре на напорной гидромагистрали, при максимальном расчетном давлении на входе гидродвигателя;
р пр – противодавление в сливной полости гидродвигателя (0,3 … 0,8 Мпа), обеспечивающее равномерное движение гидродвигателя при изменяющейся нагрузке F H [10, 11],
![]()
![]()
где : S D р тр – суммарные линейные потери давления в напорной гидромагистрали.
Рабочее давление насоса для других элементов рабочего цикла р нбп , р нбо , р нрп2 определяют, используя уравнение (20), куда вместо р ц max подставляют соответственно р цбп , р цбо , р црп2 .
Потери давления в проточной части гидроаппаратов принимаются из справочной литературы [10, 16]. Значения D р га рекомендуются для номинального расхода. Поэтому предварительно можно принимать: для обратных клапанов – 0,05 Мпа; клапанов предохранительных и постоянной разности давлений (0,25 ? 0,8) Мпа; регуляторов расхода (0,3 ? 0,6) Мпа; фильтров (0,05 ? 0,15) Мпа; теплообменников (0,15 ? 0,2) Мпа; распределителей (0,15 ? 0,25) Мпа [10, 14].
Если расчетный расход масла через аппарат меньше номинального, фактические потери давления рассчитывают по уравнению
 , (21)
, (21)
где D р ГА , Q ГА – фактические потери давления и расход через аппарат;
D р ГАН , Q ГАН – потери давления при номинальном расходе и номинальный расход (из справочных данных).
Суммарные потери давления в гидролиниях a D р ГЛ на этом этапе расчета принимаются ориентировочно равными (0,1 ? 0,2) S D р ап и уточняются в дальнейшем в п. 4.5.6.
По расходу Q н и давлению р н определяется мощность источника питания N ип = р н ? Q н и выбираются типоразмеры одного или двух насосов (в зависимости от задания) [10, 14].
По величинам расходов, давлений выбираются типоразмеры регулирующей, управляющей и вспомогательной аппаратуры, устанавливаемой на напорной и сливной гидролиниях [10, 14].
При выборе типоразмера устройств принимают те значения расходов и давлений на участке гидромагистрали, где установлен гидроаппарат. Учитывая, что для технологического оборудования выпускается гидроаппаратура на давления 6,3 Мпа и 32 Мпа, выбор элементной базы ведется фактически по расходу Q и принятому давлению р.
По способу исполнения схемы гидропривода различают гидроаппаратуру: обычную (для навесного монтажа), приточного исполнения (устанавливаемую на гидропанелях), модульную, встраиваемую [10].
4.5.4 Расчет параметров и выбор сортамента гидролиний
Параметры всасывающих, напорных, сливных, управляющих гидролиний диаметр условного прохода d тр , толщина стенки d , определяются по максимальному расходу, давлению, скорости движения потока v ж на рассчитываемом участке магистрали [15]. Длина гидролиний определяется делением длин задаваемых гидромагистралей l н , l сл по усмотрению разработчика или из конструктивных соображений.
4.5.4.1 Диаметр гидролинии определяется выражением
 , (22)
, (22)
где скорость потока v ж рекомендуется принимать [10]:
• для всасывающих линий ? 1,2 м/с.
• для сливных линий – 2 м/с.
• для напорных линий – (3 – 5) м/с.
4.5.4.2 Толщину стенки d гидролинии (трубопровода) определяют из выражения:
 , (23)
, (23)
где к 3 – коэффициент запаса (к 3 = 1,0 ? 1,3) учитывающий возможные пульсации давлений [10];
[ s р ] – допускаемые напряжения на разрыв сечения гидролинии (для стали [ s р ] = (40 ? 60) Мпа; для меди [ s р ] = 25 Мпа).
Расчетные значения d тр и d округляют до ближайшего стандартного и принимают сортамент гидролиний (для d тр – 4, 6, 8, 10, 13, 15, 20, 25,…мм) (ГОСТ 8734-75, ГОСТ 17-72, ГОСТ 6286-73) /[10], с 337-351/.
4.5.4.3 Уточняют действительные скорости жидкости в гидролиниях
![]() , (24)
, (24)
4.5.5 Выбор марки рабочей жидкости
4.5.5.1 В соответствии с рекомендациями /[10], с 9-14/ выбирают марку рабочей жидкости, выписывают ее характеристики.
4.5.5.2 Определяют режим движения жидкости во всасывающей, сливной и напорной гидролиниях по числу Рейнольдса
 , (25)
, (25)
где n - коэффициент кинематической вязкости жидкости.
Для Re ? 2300 – режим ламинарный, Re > 2300 – режим турбулентный [1, 5].
4.5.6 Уточненный расчет потерь давления в гидромагистралях привода
Расчет ведут по уравнениям (26)
![]() (напорная линия), (26)
(напорная линия), (26)
![]() (сливная линия),
(сливная линия),
где D р Н , D р СЛ – суммарные потери в напорной и сливной линиях, определяемые для всех элементов рабочего цикла;
![]() – потери давления от сопротивлений гидроаппаратуры, местных сопротивлений, трения жидкости о стенки гидролинии [15, 16].
– потери давления от сопротивлений гидроаппаратуры, местных сопротивлений, трения жидкости о стенки гидролинии [15, 16].
Суммарные потери давления ![]() создают противодавление в сливной полости гидродвигателя р пп (см. 4.5.2.3).
создают противодавление в сливной полости гидродвигателя р пп (см. 4.5.2.3).
4.5.6.1 Потери давления в гидроаппаратуре, предварительно принятые в п. 4.5.2.3, уточняют по типоразмерам выбранных устройств /[10], с 95-221/.
4.5.6.2 Потери давления от местных сопротивлений D р мс выражаются через суммарный коэффициент местных сопротивлений и скоростной напор [15, 16].
 , (27)
, (27)
где x i – коэффициент местных потерь, зависит от вида сопротивления и принимается из справочника [15, 16];
V ж i – скорость движения потока на участке;
g - удельный вес рабочей жидкости ( g = 9000 Н/м 3 ).
4.5.6.3 Линейные потери давления в гидролиниях (за счет трения жидкости о стенки трубопровода) рассчитывают по уравнению 28:
 , (28)
, (28)
где l - коэффициент сопротивления гидролинии (коэффициент Дарси [1, 16]):
для ламинарного потока в жестких гидролиниях l = (64 ? 85)/ Re ,
для рукавов высокого давления l = (75 ? 85)/ Re ,
для турбулентного потока l = 0,316 ? Re -0,25 [1];
l – длина сливной или напорной гидролинии (графы 13, 14 таблицы 5).
После расчета составляющих потерь давления уточняются суммарные потери давления в напорной и сливной гидролиниях для всех элементов рабочего цикла.
Для несимметричного или дифференциального цилиндра суммарные потери давления на сливе D р с приводятся к эффективной площади поршня
 , (29)
, (29)
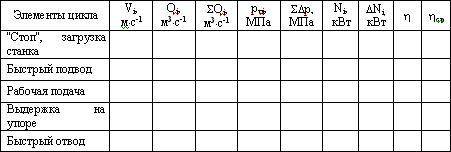
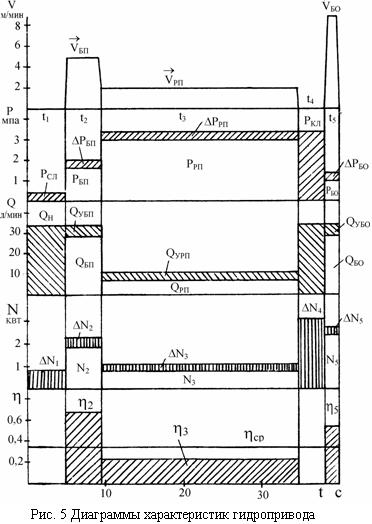
Для построения диаграмм изменения параметров гидропривода в пределах рабочего цикла расчетные данные по пп 4.5.2.1, 4.5.2.2, 4.5.2.3, 4.5.6 сводятся в таблицу 4. Графы N i , h i , h ср , заполняются позднее после расчетов в пп 4.5.9. Типовые диаграммы изменения скоростей, расходов, давлений, КПД представлены на рис. 5 и построены для рассматриваемого примера.
Таблица 4.
Результаты расчета характеристик гидропривода.
4.5.7 Уточняют потребное рабочее давление р Р , которое необходимо создать на входе привода
![]() , (30)
, (30)
Определяют давление настройки предохранительного клапана насосной установки
![]() , (31)
, (31)
4.5.8. По данным табл. 4 определяют энергетические характеристики гидропривода:
4.5.8.1 Мощность гидродвигателя (гидроцилиндра или гидромотора) на каждом этапе рабочего цикла определяется выражением:
![]() , (32)
, (32)
где р П i , Q П i – соответственно рабочее давление и расход гидроцилиндра на i – ом этапе рабочего цикла, необходимые для преодоления нагрузки F нм .
4.5.8.2 Мощность, потребляемая насосом на каждом этапе рабочего цикла
 , (33)
, (33)
Для насоса постоянной производительности, работающего с избыточным объемом р н = р кл .
4.5.8.3 Коэффициент полезного действия (КПД) гидропривода
 , (34)
, (34)
4.5.8.4 Среднецикловой КПД гидропривода
![]() , (35)
, (35)
где t 1 … t i – времена этапов рабочего цикла (таблица 1).
Результаты расчетов по (32-35) сводят в табл. 4 и используют для построения диаграмм N = ¦ ( t ), h = ¦ (t) рис. 5. При невысоком h ср < (0,15 ? 0,2) предлагаются конкретные приемы по его увеличению, а при необходимости корректируется предлагаемая схема привода.
4.5.8.5 Суммарные потери мощности гидропривода за весь рабочий цикл определяется уравнением 36:
![]() , (36)
, (36)
4.6. ОБЕСПЕЧЕНИЕ РАЦИОНАЛЬНОГО ТЕПЛОВОГО РЕЖИМА РАБОТЫ ГИДРОПРИВОДА.
Причиной нагрева масла являются потери мощности D N в гидроприводе. Поверхность бака излучают тепло его в окружающую среду и служит естественным охладителем. Для обеспечения нормального теплового режима работы гидропривода без принудительного охлаждения определяют необходимый объем рабочей жидкости в гидробаке насосной установки.
При известной площади поверхности S б превышение установившейся температуры масла Т У в баке над температурой окружающей среды Т 0 составляет D Т= Т У -Т 0
![]() , (37)
, (37)
где К Т – коэффициент теплопередачи от бака в атмосферу. При отсутствии интенсивной циркуляции воздуха вблизи стенок бака К Т =17 Вт/(м 2 ? с); при обдуве стенок бака струей воздуха от вентилятора К Т = 23 Вт/(м 2 ? с) [10].
Для определения S б можно принимать [6, 10]
![]() , (38)
, (38)
где V d – объем масла в баке.
При максимально допускаемом D Т = 35 о С необходимый объем масла в баке V определяется выражением 39
 , [(л)] (39)
, [(л)] (39)
Объем масла в баке можно уменьшить, применяя принудительное охлаждение (воздушные или водяные теплообменники, в которых коэффициент К Т может увеличиваться в 7-10 раз (для поверхности радиатора или змеевика).
4.7. РАСЧЁТ МОЩНОСТИ ПРИВОДНОГО ЭЛЕКТРОДВИГАТЕЛЯ, ВЫБОР НАСОСНОЙ УСТАНОВКИ.
Гидроприводы технологического оборудования чаще всего работают в повторно-кратковременном режиме работы. Время рабочего цикла, как правило, не превышает 10 мин. В этих условиях электродвигатель насоса выбирается по эквивалентной мощности.
 (40)
(40)
На каждом из этапов рабочего цикла длительностью t 1 , t 2 ,…t i мощность не должна превышать максимально допустимого значения для выбранного типа электродвигателя N max = (M max /M ном ). Величины N ном и М mаx /М ном определяются по каталогу электродвигателей. Так для электродвигателей серии 4А М max /М ном = 1,7 ? 2,2 [7, 10].
Результаты расчетов по пп 4.5.8-4.5.11 позволяют выбрать унифицированную насосную установку /[10], с. 374-408/. В пояснительной записке приводится ее техническая характеристика и принципиальная гидравлическая схема. При этом гарантированно обеспечиваются требования к источнику питания гидропривода.
4.8. ГРАФИЧЕСКАЯ ЧАСТЬ ПРОЕКТА.
По заданию руководителя проекта из состава элементной базы гидропривода выполняется сборочный чертеж одного из его функциональных блоков: управления скоростью, направлением движения, позиционированием, разгрузки системы от давления, веса перемещающихся частей и д.р.
На листе 2 графической части работы выполняются общий вид, разрезы заданного блока, спецификация, технические требования. При компоновке блока необходимо использовать стыковую, модульную или встраиваемую гидроаппаратуру [10, 14].
В пояснительной записке приводится описание работы предлагаемого функционального блока.
При выполнении курсового проекта по дисциплине «Гидропривод и гидравлические средства автоматики» (специальность 121100) выполняются следующие этапы: динамический расчет гидропривода, разработка схемы управления, монтажной схемы и общего вида гидропривода (3, 4 листы графической части проекта).
В заключительном разделе работы дается оценка полученных результатов, их достоверности, технико-экономического уровня предлагаемых решений, приводится список литературы.
5. Варианты заданий курсового проектирования (таблица 5).
Таблица 5
№ 1
Заданный рабочий цикл привода подачи стола фрезерного станка
• Исходное положение «Стоп».
• Быстрый подвод вправо с V БП .
• Рабочий ход вправо с V РП1 .
• Реверс движения.
• Быстрый отвод с V БО .
Исходные данные:
• расположение цилиндра горизонтальное;
• скорость рабочего хода регулируемая, стабилизирована по нагрузке;
• скорости быстрого подвода и отвода нерегулируемые с использованием суммарной производительности;
• в положении «Стоп» насосы разгружены при минимальном давлении;
• при рабочем ходе разгружен насос низкого давления;
• время реверса регулируемое.
№ 2
Заданный рабочий цикл привода протяжного станка
• Исходное положение «Стоп».
• Рабочий ход стола с V РП .
• Выдержка на упоре.
• Быстрый отвод стола V БО .
Исходные данные:
• расположение силового цилиндра – горизонтальное;
• скорости рабочего хода – регулируемые;
• скорости обратного хода – постоянные;
• разгрузка насоса в положении поршня «Стоп»;
• управление распределителем гидравлическое от упоров стола;
• время реверсирования стола не регулируется;
• останов цилиндра в любом положении поршня;
• система остается заполненной при отключенном насосе.
№ 3
Заданный рабочий цикл вертикально-сверлильного станка
• Исходное положение «Стоп».
• Рабочий ход вниз с V РП .
• Реверс движения.
• Быстрый отвод вверх с V БО .
Исходные данные:
• расположение силового цилиндра – вертикальное;
• рабочая скорость каретки – регулируемая;
• скорость V БО – постоянная;
• уравновешивание веса перемещающихся частей;
• разгрузка насоса при остановке поршня в любом положении;
• управление реверсивным распределителем – гидравлическое.
№ 4
Заданный рабочий цикл хонинговального станка
• Исходное положение «Стоп».
• Рабочий ход вниз с V РП .
• Реверс движения.
• Обратный ход вверх с V БО = V РП2 .
Исходные данные:
• расположение силового цилиндра – вертикальное;
• соединение силового цилиндра с насосом – дифференциальное (для обеспечения равных скоростей рабочего и обратного хода силового поршня);
• уравновешивание веса перемещающихся частей;
• разгрузка насоса в любом положении каретки;
• управление циклом от конечных выключателей;
• давление в системе управления – пониженное;
• регулирование скоростей каретки – дроссельное;
• управление реверсом электрогидравлическое с регулированием времени реверсирования движения.
№ 5
Заданный рабочий цикл привода поперечной подачи токарного полуавтомата
• Исходное положение «Стоп».
• Рабочий ход вправо с V РП .
• Выдержка на упоре.
• Обратный ход с V БО .
Исходные данные:
• скорости рабочего и обратного хода регулируемые, независимые;
• разгрузка насоса в положении «Стоп»;
• стабилизация скорости только во время рабочего хода, при обратном ходе скорость не стабилизирована;
• управление распределителем гидравлическое от упоров стола, без регулирования времени реверса;
• движение стола обеспечивает гидромотор через зубчатую передачу с U =1/3 и передачу винт-гайка с t В =25 мм.
№ 6
Заданный рабочий цикл агрегатной головки
• Исходное положение «Стоп».
• Быстрый подвод вправо с V БП .
• Рабочий ход вправо с V РП .
• Выдержка на упоре.
• Быстрый отвод с V БО .
Исходные данные:
• расположение силового цилиндра – горизонтальное;
• скорость рабочего хода – регулируемая;
• скорость обратного хода нерегулируемая с использованием полного расхода насоса;
• разгрузка насоса в положении «Стоп»;
• скорость быстрого подвода нерегулируемая с использованием суммарного расхода насосов.
№ 7
Заданный рабочий цикл агрегатной головки
• Исходное положение «Стоп».
• Быстрый подвод влево с V БП .
• Рабочий ход влево с V РП .
• Реверс движения.
• Быстрый отвод с V БО .
Исходные данные:
• расположение силового цилиндра – горизонтальное;
• скорости рабочего хода регулируются дросселем, но без стабилизирующих устройств;
• обратный ход – нерегулируемый с использованием полного расхода насосной станции;
• разгрузка насосов в положении «Стоп»;
• управление – электрогидравлическое;
• движение стола обеспечивает гидромотор через зубчатую передачу с U =1/2 и передачу винт-гайка с t В =15 мм.
№ 8
Заданный рабочий цикл радиально-сверлильного станка
• Исходное положение «Стоп».
• Быстрый подвод вниз с V БП .
• Рабочий ход вниз с V РП .
• Реверс движения.
• Быстрый отвод вверх с V БО .
Исходные данные:
• расположение силового цилиндра – вертикальное;
• скорости рабочих ходов – регулируются дросселем на «выходе» с применением стабилизатора;
• обратный ход поршня с постоянной скоростью на полный расход насоса;
• команда на реверс поршня от конечных выключателей;
• управление распределителем – электрогидравлическое;
• уравновешивание веса перемещаемых частей;
• принудительный теплоотвод из системы;
• останов в любом положении с разгрузкой насоса.
№ 9
Заданный рабочий цикл фрезерного полуавтомата
• Исходное положение «Стоп».
• Быстрый подвод вправо с V БП .
• Рабочий ход вправо с V РП1 .
• Рабочий ход вправо с V РП2 .
• Реверс движения.
• Быстрый отвод с V БО .
Исходные данные:
• расположение силового цилиндра – горизонтальное;
• скорости рабочего хода регулируются дросселями, стабилизированы по нагрузке;
• команда на реверс стола, изменение скорости поступает от упоров, действующих на конечные выключатели;
• обратный ход с постоянной скоростью;
• управление циклом работы – от распределителя;
• в положении «СТОП» обеспечить разгрузку насоса;
• дроссель совместно с 3-позиционным распределителем образуют 3-х скоростную панель.
№ 10
Заданный рабочий цикл отрезного станка
• Исходное положение «Стоп».
• Быстрый подвод вправо с V БП .
• Торможение цилиндра, медленный подвод с V РП1 .
• Рабочий ход вправо с V РП2 .
• Реверс движения.
• Быстрый отвод с V БО .
Исходные данные:
• расположение цилиндра – горизонтальное;
• быстрый подвод и отвод обеспечивается полной производительностью насоса;
• медленный подвод обеспечивает обычный дроссель, подключаемый распределителем;
• регулятор расхода обеспечивает скорости рабочего хода;
• останов в любом положении с разгрузкой насоса;
• время реверса регулируется;
• регулируемое подпорное давление на сливе.
7. Элементная база гидропривода к заданиям (таблица 6).
Таблица 6.
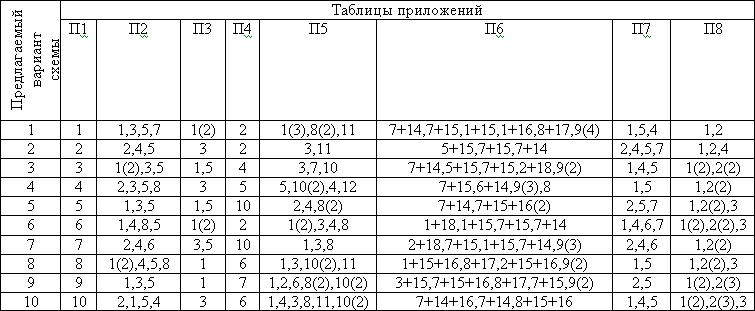
Пример выбора задаваемой элементной базы гидропривода для задания №01.
Вариант схемы 1 из таблицы 6. Из таблиц П1…П8 выбираются элементы гидропривода:
П1 – 1;
П2 – 1,3,5,7;
П3 – 1(2);
П4 – 2;
П5 – 1(3),8(2),11;
П6 – 7+14,7+15,1+15,1+16,8+17,9(4)
П7 – 1,5,4;
П8 – 1,2.
Примечания:
1. В скобках указано количество элементов, например для 8(2) – выбираются 2 восьмых элемента.
8. Таблицы П1…П8 задаваемой элементной базы.
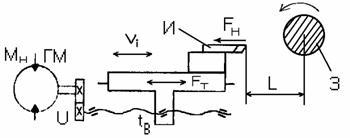
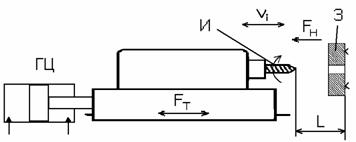
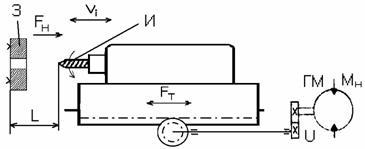
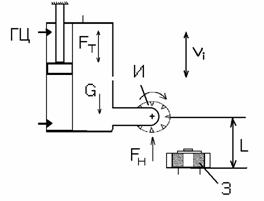
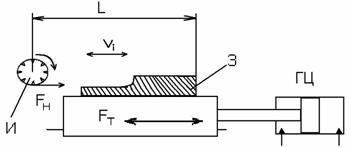
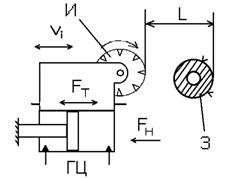
Исполнительные механизмы МОО.
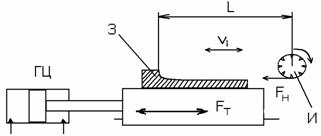
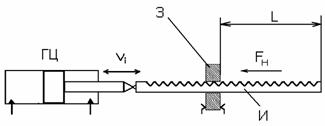
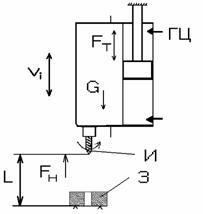
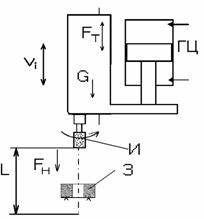
Таблица П1. (И - инструмент, З - заготовка)
Вариант схемы |
Расчетная схема механизма |
1 |
|
2 |
|
3 |
|
4 |
|
5 |
|
6 |
|
7 |
|
8 |
|
9 |
|
10 |
|
Элементная база гидропривода.
Кондиционеры и емкости Таблица П2.
Код устр |
Условное обозначение |
Буквенное обозначение |
1 |
2 |
3 |
1 |
|
Ф |
2 |
|
ФИ |
3 |
|
ТО |
4 |
|
ТПО |
5 |
|
БО |
6 |
|
БЗ |
7 |
|
ГА |
8 |
|
ПГА |
Источники питания Таблица П3.
1 |
2 |
3 |
1 |
|
НП |
2 |
|
НПР |
3 |
|
НР |
4 |
|
НРР |
5 |
|
ГА |
6 |
|
ПР |
Гидродвигатели Таблица П4.
1 |
2 |
3 |
Гидроцилиндры |
||
1 |
|
ГЦ1 |
2 |
|
ГЦ1 |
3 |
|
ГЦП |
4 |
|
ГЦ2 |
5 |
|
ГЦ1Д |
6 |
|
ГЦТ |
7 |
|
ГЦТУ |
1 |
2 |
3 |
Гидромоторы |
||
8 |
|
ГМН |
9 |
|
ГМР |
10 |
|
ГМРВ |
11 |
|
ДПГ |
Регулирующие устройства Таблица П5.
1 |
2 |
3 |
Для давления Р |
||
1 |
|
КН |
2 |
|
КНУ |
3 |
|
КД |
4 |
|
КР |
5 |
|
КРД |
6 |
|
КСД |
7 |
|
КПД |
1 |
2 |
3 |
Для расхода Q |
||
8 |
|
ДРР |
9 |
|
ДРП |
10 |
|
ДРР+КО |
11 |
|
РР |
12 |
|
РР+ КД |
13 |
|
ДП |
Распределители Таблица П6.

Контрольно-измерительные приборы Таблица П7.
1 |
2 |
3 |
Исполнение |
||
1 |
|
М |
2 |
|
ЭКМ |
3 |
|
МД |
4 |
|
ПМ |
5 |
|
Т |
6 |
|
ТЭК |
7 |
|
РВ |
8 |
|
РХМ |
9 |
|
ТХМ |
10 |
|
М кр |
Управляющие устройства Таблица П8.
1 |
2 |
3 |
Исполнение |
||
1 |
|
У |
2 |
|
ВК |
3 |
|
РД |
4 |
|
СИ |
5 |
|
“нет” |
6 |
|
“да” |
7 |
|
“ или ” |
8 |
|
“ и ” |
• Гидравлика, гидромашины и гидроприводы: Учебник для машиностроительных вузов/Т.М. Башта, С.С. Руднев, Б.Б. Некрасов и др. 2-е изд., перераб.-М.: Машиностроение, 1982.- 432с.
• Сборник задач по машиностроительной гидравлике, под. ред. Кукольского И.И., Подвидза Л.Г., Машиностроение, 1972, 471 с.
• Трифонов О.Н., Иванов В.И., Трифонова Г.О. Приводы автоматизированного оборудования. - М.: Машиностроение, 1991.-336 с.
• Гидроприводы и гидропневмоавтоматика станков/В.А. Федорец, М.Н. Педченко, А.Ф. Пичко и др.; Под. Ред. В.А. Федорца.- Киев,: Выс. Шк., 1987. - 375 с.
• Навроцкий К.Л. Теория и проектирование гидро- и пневмоприводов: Учебник для студентов вузов по специальности "Гидравлические машины, гидроприводы и гидропневмоавтоматика" - М.: Машиностроение, 1991. 384 с: ил.
• Проектирование гидравлических систем машин/ Иванов Г.М,, Ермаков С. А., Коробочкин Б.Л., Пасынков Р.М. - М.: Машиностроение, 1992 - 224 с.
• Проектирование металлорежущих станков и станочных систем: Справочник-учебник. В 3-х т. Т. 2. Ч. 1, И/ Под общ. ред. А.С. Проникова. - М.: Изд-во МГТУ им. Н.Э. Баумана М.: Машиностроение, 1995.
• Металлорежущие станки. Под. ред. Колева НС. - М.: Машиностроение, 1982. - 400 с.
• Кузнецов М.М., Усов Б.А., Стародубов В.С. Проектирование автоматизированного производственного оборудования. - М.: Машиностроение, 1987. - 288 с.
• Свешников В.А., Усов А.А. Станочные гидроприводы: Справочник. -М.: Машиностроение, 1988. - 512 с.
• Сидоренко В.С. Синтез структуры быстроходных позиционных узлов технических систем .//Гидропневмосистемы технологических и мобильных машин: Межвуз. сб. науч. тр. Ростов - на - Дону, 1998.
• Синтез позиционных систем программного управления управления/А.А. Вавилов, А.Д. Вальчихин, И.А. Карасий и др.; Под. ред А.А. Вавилова. - Л.: Машиностроение, 1977. - 280 с: ил.
• Робо тизированные технологические комплексы и гибкие производственные системы в машиностроении. Под. ред. ЮМ. Соломенцева. -М.: Машиностроение, 1989. - 190 с.
• Гидравлическое, пневматическое смазочное оборудование общего назначения, изготовляемое в СНГ, Литве, Латвии в 1992 г.: информационный материал, г. Санкт-Петербург., 1992.-127 с.
• Тумаков А.А., Яцухин Ю.А., Чернавский В.А.. Расчет магистралей гидравлических и пневматических приводов машин. Метод. указания. ДГТУ, Ростов н/Д, 1994. - 19 с.
• Идельчик И.Е Справочник по гидравлическим сопротивлениям. Изд. 2-е. М.: Машиностроение, 1975-326 с.
• ГОСТ 2.701-76 "Схемы. Виды и типы. Общие требования к выполнению."
• ГОСТ 2 704-76 "Правила выполнения гидравлических и пневматических схем."
• ГОСТ 2.780-96 "Обозначения условные и графические. Кондиционеры рабочей среды, емкости гидравлические и пневматические"
• 2.781-96 "Обозначения условные графические. Аппараты гидравлические и пневматические, устройства управления и приборы контрольно-измерительные."
• 2.782-96 "Обозначения условные графические. Машины гидравлические и пневматические."
| На главную |