|

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ДОНСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ЦЕНТР ДИСТАНЦИОННОГО ОБУЧЕНИЯ
Кафедра «Сервис
и техническая эксплуатация автотранспортных средств»
Конструкция, расчет и потребительские
свойства автомобилей
РАСЧЕТ МЕХАНИЗМОВ, СИСТЕМ И
ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ АВТОМОБИЛЯ
Учебное пособие
9. РАСЧЕТ УПРАВЛЯЕМОСТИ АВТОМОБИЛЯ
9.1. Колебания колес и осей автомобиля
Изменения конструкции автомобиля в процессе его совершенствования (повышение
эластичности шин и изменение схем подвесок), а также повышение скоростей движения создали условия, вызывающие колебания передних колес.
Отмечено, что при движении автомобилей могут в ряде случаев возникать угловые колебания управляемых колес вокруг поворотных стоек
(шкворней).
Угловые колебания управляемых колес вызываются разными причинами. Если колеса недостаточно сбалансированы,
то при их вращении возникают центробежные силы Рц (рис.15, а). Составляющие Рх этих сил образуют моменты,
стремящиеся повернуть колеса вокруг поворотных стоек. Особенно неблагоприятны случаи, когда неуравновешенными оказываются оба колеса,
причем их центробежные силы направлены в противоположные стороны (рис.15,б). Возникающие в результате этого суммарные поворачивающие
моменты переменны по направлению и вызывают «виляние» колес. Наряду с этим составляющие Рц центробежных сил вызывают
«раскачивание» колес в вертикальной плоскости. Чем выше скорость движения, тем заметней влияние неуравновешенности колес.
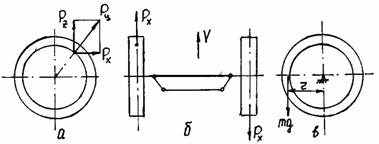
Рис.15. Схема сил, возникающих при неуравновешенности управляемых колес
Величина центробежной силы инерции
Pц = mω2r,
где m – неуравновешенная масса на диске колеса;ω – круговая частота вращения колеса; r– радиус вращения
неуравновешенной массы.
Величину массы m определяют при статической балансировке колеса путем измерения момента МДБ
дисбаланса, создаваемого силой веса mg (рис.15,в).
Величина массы

где m – неуравновешенная масса, кг; Мдб – момент дисбаланса, Нм; g – ускорение свободного
падения, g= 9,8 м/с²; r – радиус вращения неуравновешенной массы, м.
Одной из причин появления сил, вызывающих колебание передних колес вокруг поворотных стоек (шкворней),
является гироскопический момент, возникающий при деформации подвески, изменяющей плоскость расположения колеса. Наиболее
распространенной для легковых автомобилей отечественных марок является независимая подвеска на поперечных рычагах (рис.16,а). При
деформации подвески в результате наезда колеса на дорожную неровность только равная длина рычагов обеспечит сохранение установленного
угла развала колеса. Однако при этом колесо будет смещаться в поперечном направлении, что приведет к изменению колеи автомобиля,
ухудшению устойчивости и большему износу шин. Поэтому обычно рычаги подвески делают неодинаковой длины, что уменьшает смещение колес
в поперечном направлении, но вызывает изменение угла развала колес и приводит к возникновению гироскопического момента.
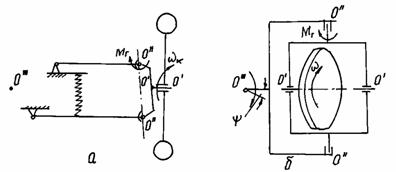
Рис.16. Схема независимой рычажной подвески колеса (а) и схема гироскопа (б)
Суть гироскопического эффекта можно пояснить на схеме простейшего гироскопа
(рис. 16,б). На горизонтальной оси О'О', установленной в подшипниках рамки, закреплен ротор. Рамка может поворачиваться вокруг
вертикальной оси О''О'' аналогично управляемому колесу вокруг поворотной стойки; она может также качаться вокруг оси, перпендикулярной
чертежу и проходящей через точку О'''.
Если при вращающемся роторе повернуть гироскоп вокруг точки О''' в плоскости чертежа, то рамка с ротором
начнет поворачиваться вокруг вертикальной оси О''О''. Это свойство и носит название гироскопического эффекта.
Гироскопический момент при повороте рамки вокруг оси О''О'' определяют по формуле
где I – момент инерции ротора; ω – угловая частота вращения ротора;
φ – угол поворота гироскопа вокруг точки О'''.
Аналогичное явление произойдет при деформации рычажной подвески управляемого колеса (см.рис.16,а).
Вращающееся вокруг оси О'О' колесо с угловой частотой ωк при деформации подвески и ее повороте вокруг некоторой
точки О''' будет стремиться одновременно повернуться вокруг оси О''О'' поворотной стойки с поворачивающим моментом Мг.
Направление гироскопического момента Мг периодически изменяется в зависимости от направления
поворота рычагов подвески вокруг точки О'''.
При зависимой подвеске передних колес балка моста заключена между двумя эластичными элементами – шинами и
рессорами, что может привести к вертикальным колебаниям оси балки. Наиболее опасным для движения автомобиля являются угловые
вертикальные колебания оси. Для определения частоты таких колебаний рассмотрим положение оси в процессе колебаний, определяемое
углом ψ (рис.17).
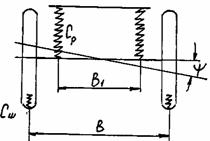
Рис.17. Схема угловыхколебаний передней оси в вертикальной плоскости
В этом положении моменты от рессор и шин стремятся вернуть ось в первоначальное
горизонтальное положение. Момент от рессор можно принять равным:
Мр=½·B1 ·ψ·Ср·В1
=½·В1²·Ср·ψ ,
где Ср – жесткость рессоры.
Аналогично восстанавливающий момент от шин будет равен:
Мш=½ В²Сшψ,
где Сш – жесткость шины.
Из механики известно, что частота угловых колебаний

| где Сф – угловая жесткость системы, равная |
 |
, I – момент инерции моста. |
Подставив выражение моментов, получим
Таким образом, угловая частота собственных колебаний переднего моста уменьшается
при снижении жесткости рессор и шин, а также при увеличении момента инерции моста. Силами, которые могут вызвать колебания моста,
являются, во-первых, неровности дороги, а во-вторых, неуравновешенность передних колес автомобиля.
Зная причины, вызывающие колебания колес и оси, можно наметить пути уменьшения этих колебаний.
Влияние неуравновешенности колес устраняется путем уменьшения допусков на дисбаланс колес в сборе. Кроме
того, для уменьшения влияния неуравновешенности колес на их колебания вокруг шкворней целесообразно уменьшить расстояние от шкворня до
плоскости колеса, т.е. размещать шкворень внутри обода колеса. В результате при той же неуравновешенности колес можно уменьшить плечо
действия центробежных сил и этим уменьшить колебания колес. Существенное уменьшение колебания колес вокруг поворотных стоек возможно
устранением гироскопического момента путем применения подвески, деформация которой не вызывает изменение плоскости колеса. Хорошие
результаты даст применение рычажной подвески, у которой нижние рычаги немного длиннее верхних так, чтобы изменение колеи было не более
4 мм. Такое изменение колеса не отражается на управляемости автомобиля и на износе шин. Телескопическая подвеска обеспечивает
перемещение колеса строго в одной плоскости при деформации упругого элемента.
| 