|

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ДОНСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ЦЕНТР ДИСТАНЦИОННОГО ОБУЧЕНИЯ
Кафедра «Сервис
и техническая эксплуатация автотранспортных средств»
Конструкция, расчет и потребительские
свойства автомобилей
РАСЧЕТ МЕХАНИЗМОВ, СИСТЕМ И
ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ АВТОМОБИЛЯ
Учебное пособие
10. РАСЧЕТ УСТОЙЧИВОСТИ АВТОМОБИЛЯ
10.2. Поперечная устойчивость автомобиля
Поперечная устойчивость автомобиля характеризуется его способностью двигаться
без опрокидывания и скольжения при прямолинейном движении по дороге с поперечным уклоном и при движении на повороте.
При прямолинейном движении автомобиля по дороге с поперечным уклоном опрокидывающая сила равна
составляющей силы веса G·sinß (рис.23).
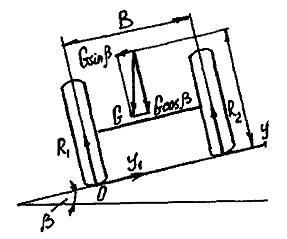
Рис.23. Схема сил при движении автомобиля по дороге с поперечным уклоном
Из условия равновесия автомобиля относительно оси, проходящей через точки О
опоры левых колес, получим:
где R2 - сумма нормальных реакций на правых колесах; В - колеса автомобиля.
В момент начала опрокидывания нормальные реакции на правые колеса автомобиля становятся равными нулю
(R2=0), тогда
До опрокидывания может начаться скольжение автомобиля под уклон. Если допустить,
что колеса передней и задней осей автомобиля имеют одинаковое сцепление с дорогой и что боковые реакции y1 и y2
распределяются по осям так же, как и составляющие силы веса, то получим:
| y1+y2=Gsinß=φGcosß, |
 |
или tgßскол.=φ |
При условии, когда φ<В/2h, скольжение колес автомобиля начинается
раньше его опрокидывания.
При движении автомобиля на повороте по горизонтальной дороге опрокидывающей является центробежная сила
Рц (рис.24), равная:
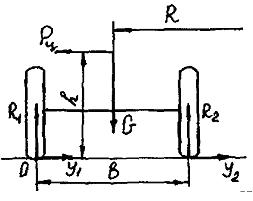
Рис.24. Схема сил при движении автомобиля на повороте
Опрокидывание автомобиля начнётся в тот момент, когда нормальная реакция
R2, действующая на внутренние колёса, будет равна нулю. Из условия равновесия автомобиля относительно оси, проходящей через
точки О опоры внешних колёс, получим:
Приравняв реакцию R2 к нулю и подставив значение центробежной силы,
получим:
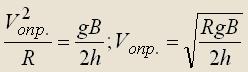
Боковое скольжение автомобиля начнется в тот момент, когда сумма боковых
реакций достигнет силы сцепления φ G, т.е. при

| или V²скол=φg; |
 |
При движении автомобиля на его поперечную устойчивость оказывает существенное
влияние поперечный профиль дороги на закруглениях, т.е. на виражах. Рассмотрим условия поперечной устойчивости автомобиля при движении
на вираже. Опрокидывающей силой в этом случае будет составляющая Рцcosß центробежной силы (рис.25). Составляя уравнение
моментов сил по отношению к оси, проходящей через точки О опоры верхних колес, получаем:

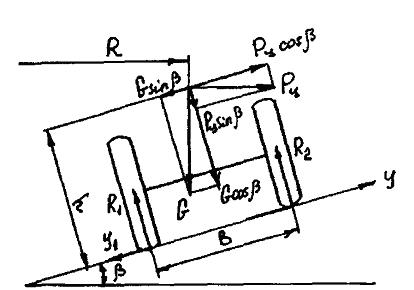
Рис.25. Схема сил при движении автомобиля на вираже
Подставив в это уравнение выражение для центробежной силы и приравняв реакцию
R1 нулю, получим:
Разделим числитель и знаменатель правой части полученного выражения на h и
заменив B/2h=tgßlim, запишем окончательно:
Из этого уравнения видно, что если выбирать соответствующие углы ß,
то скорость движения может быть произвольно велика, и если
| 1-tglimß, или |
 |
то опрокидывания не произойдет при любой сколь угодно большой скорости.
Автомобиль начнет скользить вбок при условии

Из условия равновесия автомобиля относительно оси у (см.рис.25) запишем:

Решив эти уравнения совместно, получим:
 |
или |
 |
Сравнивая значения Vопр. и Vскол., можно определить, что
наступит раньше, опрокидывание или скольжение автомобиля вбок.
Последнее уравнение позволяет установить, что при увеличении угла ß скорость движения автомобиля,
допустимая по скольжению вбок, также увеличивается, и что при 1-φ tgß=0 эта скорость может быть равна бесконечности. Таким
образом, при tgß=1/φ скольжения вбок не будет, и скорость движения может быть произвольно велика.
Чтобы увеличить поперечную устойчивость автомобиля при высоких скоростях движения в реальных дорожных
условиях, закругления на автомагистралях выполняют с большими радиусами, порядка 300…1000м, а полотну дороги придают на закруглениях
поперечный уклон, направленный к центру закругления; величина уклона берется в пределах ß=8…12°.
При рассмотрении процесса поперечного скольжения автомобиля было принято допущение, что боковое скольжение
начиналось одновременно как для передних, так и для задних осей. В общем случае скольжение передних и задних колес может начаться
неодновременно или происходить с неодинаковой интенсивностью, в результате чего возникает непроизвольный поворот машины вокруг какой-то
вертикальной оси. Такое явление называется заносом. Заносы чаще всего наблюдаются при резких торможениях и разгонах, на поворотах, при
движении по дороге с поперечным уклоном и т.д. Влияние перечисленных факторов особенно проявляется на мокрых и скользких дорогах и в
других случаях, когда сцепление колес с дорогой ухудшается.
Возможность заноса при торможении и разгоне автомобиля объясняется тем, что в это время на колеса
действуют значительные касательные силы, а их наличие снижает устойчивость колес против бокового скольжения. При разгоне автомобиля
ведущая ось более подвержена боковому скольжению, так как через ее колеса передается крутящий момент.
При торможении автомобиля боковое скольжение может начинаться в равной мере как для ведущей оси, так и для
ведомой.
На рис.26 показана схема автомобильного колеса, нагруженного вертикальной Gк и боковой
Рб силами, а также моментом Мк1, вызывающими тяговую силу Рт.
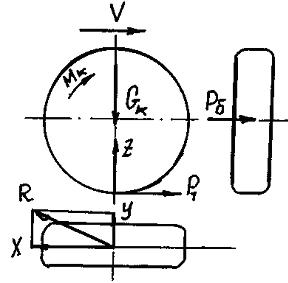
Рис.26. Схема сил, действующих на автомобильное колесо
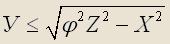
Это условие позволяет определить максимальную допустимую по условию скольжения
величину боковой реакции У.
| X²+Y²=R²≤φ²Z²; |
 |
Из неравенства видно, что устойчивость колеса в значительной степени зависит от
величины тяговой (или тормозной) силы, и в том случае, когда она достигнет своего максимального значения, равного φZ(X=φZ),
теоретически достаточно любой, как угодно малой, боковой силы, для того чтобы вызвать скольжение колеса вбок.
Рассмотрим условия бокового скольжения ведущей оси автомобиля, который совершает поворот по дуге
окружности с радиусом R, движется с постоянной скоростью и развивает на ведущих колёсах тяговую силу РТ. В площади контакта
колеса с дорогой возникает реакция дороги от приложенных сил: от боковой силы – У, от силы веса автомобиля, приходящейся на колесо – Z и
от тяговой силы - Х. Равнодействующая R окружной и боковой реакции (Х и У) расположена в плоскости дороги. Для того чтобы колесо не
скользило, необходимо, чтобы сила сцепления колеса с дорогой была больше равнодействующей, т.е. R≤φZ.
На ось (рис.27) приходится часть G1 полной силы веса G автомобиля и часть РЦ1 полной
центробежной силы Рц, действующей на автомобиль. В результате действия этих сил в точках опоры колес с дорогой возникают
реакции: от тяговой силы – X’1 и X”1, от боковой силы – Y’1 и Y”1 и от вертикальной силы –
Z’1 и Z”1.
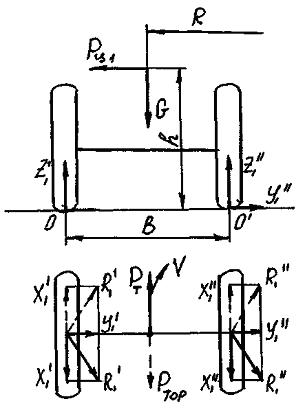
Рис.27. Схема сил, действующих на ось автомобиля
Внутренние и внешние колеса оси по-разному нагружаются силами. Из-за
центробежной силы перераспределяются по колесам нормальные реакции, а из-за дифференциала - реакции тяговых сил.
Из условия равенства моментов всех сил относительно оси, проходящей через точку О опоры внешнего колеса,
имеем:
Аналогично из условия равенства моментов относительно оси, проходящей через точку О, получим, что
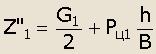
Как видно, нормальная реакция Z’’1, действующая на внутреннее колесо, меньше нормальной реакции
Z’1, действующей на внешнее колесо.
Наличие дифференциала обеспечивает передачу большей части крутящего момента через отстающее, в данном случае, внутреннее колесо. Поэтому при
всех условиях X’1<X”1.
Таким образом, внутреннее колесо (на рис.27 – правое) нагружено меньшей нормальной реакцией и большей реакцией от тяговой силы. Следовательно,
внутреннее колесо ведущей оси автомобиля раньше, чем внешнее, теряет устойчивость и начинает буксовать.
В момент начала буксования одного колеса почти вся суммарная боковая сила начинает восприниматься другим колесом, нагруженным еще и тяговой
силой. Часто оно оказывается не в состоянии передать суммарную боковую силу, что приводит к заносу всей оси.
Поперечное скольжение вбок задней или передней оси поразному влияет на устойчивость автомобиля.
При заносе задней оси направление ее движения не совпадает с продольной осью автомобиля и определяется вектором VB (рис.28,а).
Передняя ось продолжает движение в неизменном направлении, определяемом вектором VA.
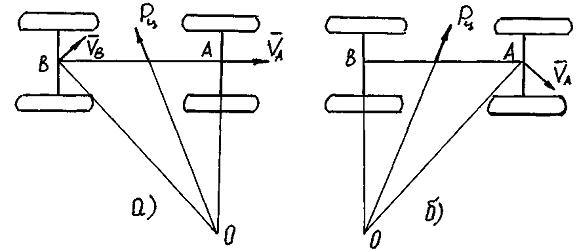
Рис.28. Схема сил при заносе задней оси (а) и передней оси (б)
Эти два вектора позволяют определить положение мгновенного центра поворота путем восстановления перпендикуляров к
этим векторам. В результате движения автомобиля вокруг центра О возникает центробежная сила Рц, которая ориентирована в сторону заноса задней оси и таким образом
стремится его увеличить.
При заносе передней оси автомобиля (рис. 28,б) мгновенный центр поворота лежит на продолжении задней оси. Движение автомоби-ля вокруг этого
мгновенного центра также приводит к возникновению центробежной силы Рц, но она в отличие от первого случая будет направлена в сторону, противоположную направлению
начинающегося заноса. В результате центробежная сила будет препятствовать заносу, и автомобиль в поперечном направлении будет устойчивей.
Из вышеприведенных рассуждений следует, что необходимо в первую очередь рассматривать устойчивость против бокового скольжения задней оси
автомобиля, если ось ведущая, и в любом случае – при торможении автомобиля.
Для установления зависимости, определяющей условие устойчивости по буксованию колес задней ведущей оси, вернемся к ранее полученному
соотношению между реакцией от тяговой силы и нормальной реакцией дороги на внутреннем колесе при его скольжении:
X"1=φ·Z"1,
где X”1 - реакция от составляющей тяговой силы на внутреннем колесе автомобиля при повороте (см.рис.27,б); Z”1 - нормальная
реакция дороги.
Полагая, что дифференциал незначительно влияет на перераспределение тяговых сил по полуосям, запишем, что
X"1=0,5·PТ
| Учитывая ранее выведенную зависимость для нормальной реакции: |
 |
и подставляя значение Z”1 в выражение для реакций X”1, получаем:
где G2 - сила веса автомобиля, приходящаяся на заднюю ось; РЦ2 - часть центробежной силы, приходящаяся на заднюю ось.
Для введения в уравнение параметров движения V и R заменим величины тяговой и центробежной сил их значениями. Тяговая сила PТ,
необходимая для движения с постоянной скоростью по горизонтальной дороге,
PT=f·G+K·F·V²
Центробежная сила, действующая в центре масс автомобиля,
Центробежная сила автомобиля, приходящаяся на заднюю ось,
где а – расстояние от центра масс до передней оси автомобиля.
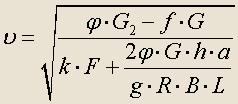
Подставив значение тяговой и центробежной сил в выведенное уравнение, получим:

тогда скорость автомобиля определится по формуле
Выведенная зависимость определяет соотношение между основными параметрами установившегося движения на повороте
(ν и R) при начинающемся заносе ведущей задней оси и показывает, какие факторы влияют на устойчивость автомобиля.
В случае торможения автомобиля, совершающего поворот на дуге окружности радиусом R и с постоянной скоростью V (схема действия реактивных сил
на колесах автомобиля показана на рис. 27 пунктиром), можно записать:
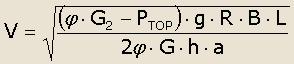
где Pтор - сила торможения, приходящаяся на заднюю ось.
Тогда скорость автомобиля определится по формуле
|