2. ПРОЕКТИРОВАНИЕ ПРИВОДА
С ПЛАНЕТАРНЫМ РЕДУКТОРОМ
2.1. Исходные данные
2.1.1. Рабочий орган и его силовые, кинематические и геометрические характеристики:
– Fро– нагрузка на рабочем органе, кН;
– v ро – скорость рабочего органа, м/с;
– Dро – определяющий размер рабочего органа, например, диаметр, м;
– Tро – вращающий момент на рабочем органе, Нм;
– nро – частота вращения рабочего органа, об/мин.
2.1.2. Условия работы привода
2.1.3. Требуемый ресурс и режим работы привода
2.1.4. Связь привода со всей конструкцией машины
2.1.5. Вид производства, для которого предназначен данный проект
2.2. Энергетический расчёт привода
2.2.1. Требуемая мощность на выходе привода , кВт: , кВт:
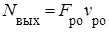 или или 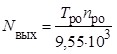 . .
2.2.2. Требуемая мощность на входе привода  , кВт: , кВт:
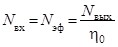 . .
Поскольку кинематическая схема привода не задана, принимаем ориентировочно общий КПД привода  = 0,8–0,9. = 0,8–0,9.
2.2.2. Ориентировочный выбор электродвигателя
По мощности на входе привода (Nэф) подбираем электродвигатель так, чтобы  . Необходимо, чтобы это неравенство выполнялось, так как подбор двигателя производится по периоду установившегося движения, нагрузки периода пуска (то есть разгона элементов привода из состояния покоя до требуемой скорости) не учитываются. . Необходимо, чтобы это неравенство выполнялось, так как подбор двигателя производится по периоду установившегося движения, нагрузки периода пуска (то есть разгона элементов привода из состояния покоя до требуемой скорости) не учитываются.
Промышленность выпускает трёхфазные электродвигатели переменного тока с разным числом полюсов: 2, 4, 6, 8. Соответственно магнитный поток в статорах этих двигателей вращается с синхронной частотой nс, равной 3000, 1500, 1000, 750 об/мин. Ротор двигателя отстаёт от магнитного потока (скользит) и поэтому рабочая (асинхронная) частота вращения ротора nа на величину скольжения меньше частоты вращения магнитного потока. Все расчёты привода выполняются по рабочей частоте вращения электродвигателя.
Если в задании на проект не оговорена частота вращения электродвигателя, можно выбрать двигатель из любой группы. Однако при этом нужно иметь в виду:
– наиболее употребляемые и выпускаемые поэтому большими партиями (то есть более дешёвые) двигатели с синхронной частотой 1500 и 1000 об/мин;
– чем ниже синхронная частота вращения двигателя, тем он больше по габаритам и по массе и, следовательно, дороже;
– чем больше частота вращения двигателя, тем больше передаточное число привода, чтобы обеспечить требуемую скорость движения рабочего органа.
2.3. Кинематический расчёт привода
2.3.1. Требуемая частота вращения рабочего органа (если она не задана в исходных данных), об/мин:
 . .
2.3.2. Требуемое (расчётное) передаточное число привода

2.3.3. Выбор схемы планетарного редуктора
Планетарные передачи имеют широкие кинематические возможности, что является основным достоинством, так как можно получать большие передаточные отношения без применения многоступенчатых передач.
Кроме того, вследствие многопоточности и использования внутреннего зацепления, передача компактна, имеет небольшие нагрузки на валы и опоры. Планетарные передачи – соосные, что позволяет удобно стыковать их с фланцевыми электродвигателями или другими элементами привода.
К недостаткам передачи можно отнести повышенные требования к точности изготовления и монтажа.
В планетарных передачах чаще используются прямозубые колёса, так как в этом случае упрощается монтаж. В случае применения колёс с косыми зубьями появляются осевые нагрузки, которые могут сильно усложнить подбор подшипников и монтаж передачи. Использование шевронных колёс можно рекомендовать только для тяжело нагруженных передач. В этом случае приходится одно из центральных колёс делать из двух половин. В пособии рассматриваются только прямозубые передачи.
Наиболее рациональными в отношении массы и габаритов являются передачи по схемам А, В, 3k. Поэтому они и рассматриваются в этом пособии.
При выборе схемы планетарного редуктора нужно исходить из возможностей схемы по передаточному числу и КПД передачи. Если потребности превышают кинематические возможности схемы, то применяют передачи, образованные последовательным соединением простых механизмов. При этом передаточное число каждого последующего механизма должно быть на 20–30 % меньше предыдущего.
По стандарту допускаемое отклонение фактического передаточного числа планетарного редуктора от заданного (номинального) не должно превышать 4 % для одноступенчатых редукторов, 5 % – двухступенчатых и 6,3 % – трёхступенчатых.
Рис. 2.1. Планетарный редуктор  : :  – межосевое расстояние между – межосевое расстояние между
солнечным колесом  и сателлитом; и сателлитом;  – межосевое расстояние между – межосевое расстояние между
сателлитом и центральным колесом b
1. Одноступенчатая передача  . Это наиболее простая и распространённая передача (рис. 2.1). Состоит из двух центральных колес – a и b (2k), с помощью которых вращение передаётся водилу – h. При этом колесо b – неподвижное. . Это наиболее простая и распространённая передача (рис. 2.1). Состоит из двух центральных колес – a и b (2k), с помощью которых вращение передаётся водилу – h. При этом колесо b – неподвижное.
Это передача типа 2k–h.
Передаточное число такой схемы определяется выражением
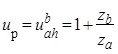 , ,
где  – число зубьев колеса а; – число зубьев колеса а;  – число зубьев колеса b; – число зубьев колеса b;
 – передаточное число редуктора. – передаточное число редуктора.
Диапазон возможных для этой схемы передаточных чисел 1,5–8(9), КПД 0,99–0,97.
2. Двухступенчатая передача
. Это передача типа 2k–h (рис. 2.2).
Обычно ведущее – центральное колесо а, неподвижное – центральное колесо b. Крутящий момент передаётся водилу h.
Рис. 2.2. Планетарный редуктор
Передаточное число такой схемы: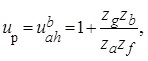
где  – число зубьев сателлита g; – число зубьев сателлита b. – число зубьев сателлита g; – число зубьев сателлита b.
Диапазон возможных передаточных чисел 7–16.
КПД 0,99–0,96.
Передачи по такой схеме применяются гораздо реже первой. Здесь нужна повышенная точность, так как сателлиты g и f зацепляются с двумя разными центральными колёсами а и b.
3. Двухступенчатая передача . .
У этой передачи
(рис. 2.3) три центральных колеса: a, b, c при закреплённом b. Крутящий момент передаётся от колеса a к колесу c. Водило h лишь поддерживает сателлиты.
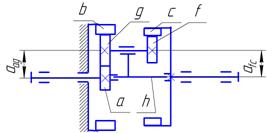
Рис. 2.3. Планетарный редуктор 
Передаточное число этой схемы:
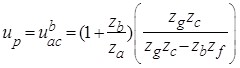 , ,
при КПД 0,9–0,8. Возможности по передаточному числу 20–500.
Передача применяется в приводах систем управления и в силовых приводах, работающих кратковременно. Потери на трение существенны. Кроме того, с увеличением передаточного числа у неё резко падает КПД, вплоть до самоторможения. Поэтому эта передача не рекомендуется для силовых передач, используемых непрерывно и длительно.
2.4. Кинематическая схема привода
Зная требуемое общее передаточное число привода  и возможности отдельных передач (в том числе и возможности различных планетарных схем), можно составить кинематическую схему: то есть такую цепочку передач, чтобы произведение их передаточных чисел ui было равно : и возможности отдельных передач (в том числе и возможности различных планетарных схем), можно составить кинематическую схему: то есть такую цепочку передач, чтобы произведение их передаточных чисел ui было равно :  . .
Поскольку в приводе обязательно должен использоваться планетарный редуктор, возможны варианты, приведенные на рис. 2.4.
Можно обойтись одним редуктором 2 (рис. 2.4,а), можно добавить ремённую передачу 6 на входе привода (рис. 2.4,б) или открытую передачу 7 на выходе привода (рис. 2.4,в). Вместо открытой зубчатой передачи может быть цепная. Применяются и дополнительные передачи одновремённо и на входе, и на выходе. Всё зависит от того, что нужно проектировщику.
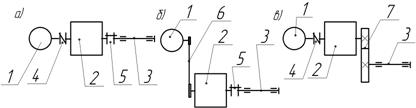
Рис. 2.4. Варианты кинематической схемы привода:
1 – двигатель; 2 – планетарный редуктор; 3 – рабочий орган;
4 – муфта быстроходная; 5 – муфта тихоходная; 6 – ремённая передача
на входе привода; 7 – открытая передача на выходе привода
Возможности дополнительных передач представлены в табл. 1. Проектирование таких передач достаточно подробно описано в литературе [7–9, 11].
Таблица 1
Возможности некоторых механических передач
Вид
передачи |
Обозначения
на кинематической схеме |
Применение |
Возможности по |
КПД |
скорости,
м/с |
мощности,
кВт |
передаточному
числу |
Открытая цилиндрическая прямозубая |

|
Оси валов параллельны
|
до 15 |
без ограничений |
до 10,
но лучше
5 |
0,94–0,96
|
Открытая
коническая
прямозубая |

|
Оси валов
пересе-каются
в одной плоскости |
до 12 |
без ограничений |
до 6,
но лучше
4 |
0,94–0,96 |
Цепная
передача |

|
Оси валов
параллельны |
до 15 |
до 100
|
тихоход.
4 |
0,92–0,94 |
Клиноремённая передача |

|
Оси валов
параллельны |
до 30 |
до 50
|
до 10;
оптимально
до 3(4) |
0,96–0,98 |
В результате всей этой работы получаем предполагаемую кинематическую схему привода, требуемое передаточное число редуктора  , требуемые крутящий момент , требуемые крутящий момент  и частоту вращения его выходного вала и частоту вращения его выходного вала  . .
Нужно помнить, что это требуемые параметры. В результате синтеза редуктора его фактическое передаточное число может несколько отличаться от требуемого. Вследствие этого, изменятся передаточные числа применяемых на входе и выходе привода передач. Поэтому до завершения синтеза редуктора, то есть до получения его фактического передаточного числа, рассчитывать эти передачи преждевременно.
2.5. Проверка правильности выбора электродвигателя
2.5.1. Уточнение КПД привода
По составленной кинематической схеме определить фактическое значение КПД привода
Коэффициенты полезного действия элементов схемы определяются по справочникам конструктора [1, 2, 10, 11, 14].
2.5.2. Определение фактической эффективной мощности, кВт:
 . .
2.5.3. Проверка правильности выбора электродвигателя
Сравнить мощность подобранного двигателя и фактическую эффективную мощность.
Если выполняется неравенство  , то никаких изменений делать не нужно. , то никаких изменений делать не нужно.
Если это неравенство не выполняется, то необходимо заново подобрать электродвигатель так, чтобы оно выполнялось.
В любом случае на входе привода будет фактическая эффективная мощность.
|



