Методические указания к выполнению контрольной работы.
В контрольной работе рассчитывают мощность электродвигателя, строят его механическую характеристику и разрабатывают принципиальную схему управления кривошипным прессом.
Мощность электродвигателя определяют на основе исходных данных, приведенных в таблице 1, в зависимости от варианта, определяемого по последней цифре зачетной книжки.
Мощность электродвигателя определяется по формуле:
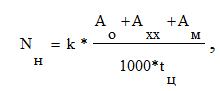
где NН - номинальная мощность электродвигателя, кВт;
k - коэффициент запаса, в практике принимаемый равным k=1,3;
A0 - работа операции, Дж,
где PН - номинальное усилие пресса, кН;
HР - рабочий ход пресса, м,
 где R=Н/2 - радиус кривошипа, м;
где R=Н/2 - радиус кривошипа, м;
 - рабочий угол, град; - рабочий угол, град;
 =0,25 – коэффициент шатуна. =0,25 – коэффициент шатуна.
АХХ - работа, необходимая для выполнения холостого хода, Дж,
АХХ=0,1xА0;
АМ - работа, необходимая для включения муфты, Дж,
АМ=JВМxW2 ,
где JВМ - приведенный момент инерции подвижных частей, кгxмxс;
W - угловая скорость маховика, с-1,
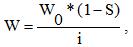
где W0 - синхронная скорость электродвигателя, с-1;
S - скольжение электродвигателя;
i - передаточное отношение от вала электродвигателя к валу маховика;
tЦ - время цикла, с;
tЦ=60/n,
где n - число ходов ползуна в минуту, ход/мин.
По полученному расчетному значению мощности из каталогов выбирают электродвигатель серии 4А ближайшей большей мощности, и выписывают все основные его характеристики.
Для построения механической характеристики электродвигателя в ее определяющее уравнение подставляется значение скольжения (S) в диапазоне от –1,5 до +1,5 с шагом 0,1. По полученным значениям строится график в координатах «крутящий момент, снимаемый с вала двигателя» - «скольжение».
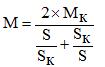 где М – момент, развиваемый электродвигателем;
где М – момент, развиваемый электродвигателем;
МК – критический момент электродвигателя,
МК=МНxК
где – кратность критического момента,
 МН - номинальный момент электродвигателя,
МН - номинальный момент электродвигателя,
 где РН – номинальная мощность электродвигателя, кВт;
где РН – номинальная мощность электродвигателя, кВт;
WН – номинальная скорость электродвигателя, с-1;
SК – критическое скольжение, соответствующее критическому моменту электродвигателя
 где SН – номинальное скольжение.
где SН – номинальное скольжение.
На механической характеристике электродвигателя необходимо отметить ее характерные точки, а именно:
- пусковой момент;
- номинальный момент;
- критический момент в генераторном и двигательном режимах.
Принципиальную электрическую схему управления работой кривошипного пресса разрабатывают на основе исходных данных, которые приведены в таблицах 2 и 3. Схему вычерчивают на листе чертежной бумаги размером 210x297 мм (формат А3) в соответствии со всеми требованиями ГОСТ 2.710-81. Схема должна быть снабжена перечнем аппаратуры и приборов, входящих в нее (обязательное наличие спецификации). В работе обязательно приводится описание принципа работы схемы.
При разработке принципиальной схемы необходимо обратить внимание на следующие положения:
- схема должна быть полностью работоспособной и отвечать всем требованиям, предъявляемым к принципиальным электрическим схемам управления кузнечно-прессовыми машинами;
- все аппараты и приборы, входящие в схему должны получать питание от цепей, величины напряжений которых соответствуют номинальным для данных типов аппаратов, а также требованиям техники безопасности;
- при управлении работой пресса с двух пультов управления необходимо предусмотреть две пары кнопок для включения и отключения электродвигателя и две станции управления работой муфты пресса;
- включение и отключение муфты пресса осуществляется посредством электромагнита;
- при наличии в приводе асинхронного электродвигателя с фазным ротором, необходимо предусмотреть его ступенчатый автоматический пуск;
- защита электродвигателя от перегрузок и токов короткого замыкания должна осуществляться в независимости от состояния работы схемы управления пресса;
- световая индикация указанных в задании режимов работы схемы осуществляется лампочками накаливания напряжением 6,3 В;
- освещение рабочей зоны пресса осуществляется лампочкой накаливания напряжением 24В;
- торможение противовключением осуществляется путем смены двух фаз в цепи питания статора электродвигателя. Автоматическое отключение электродвигателя от сети после его полной остановки осуществляется с помощью реле контроля скорости;
- динамическое торможение осуществляется путем подачи постоянного напряжения на одну из обмоток статора электродвигателя после его отключения от сети. Подача постоянного напряжения осуществляется автоматически при нажатии на кнопку отключения электродвигателя и прекращается после полной остановки электродвигателя с помощью реле времени с электромагнитным замедлителем (демпфером);
- управление работой муфты должно обеспечивать невозможность ее включения нажатием только одной из кнопок двурукого управления. После каждого хода, ползун должен останавливаться в верхней мертвой точке, в независимости от того удерживаются кнопки управления или нет. Каждый последующий ход должен быть возможен только после отпускания всех кнопок управления. При включении муфты кнопки должны удерживаться до достижения ползуном нижней мертвой точки.
Принципиальную электрическую схему управления работой кривошипного пресса составляют (разрабатывают) в следующей последовательности:
-силовая цепь электродвигателя (статора и ротора) включая входной автомат, аппаратуру защиты, пусковые и дополнительные сопротивления и т.д.;
-понижающий трансформатор напряжения с соответствующим числом вторичных обмоток для питания цепей управления, освещения и сигнализации;
-цепь управления работой электродвигателя включая блокировочные связи и ступенчатый автоматический пуск электродвигателя с фазным ротором;
-цепь дополнительного торможения электродвигателя;
-цепь управления работой муфты пресса с переключателем для двурукого и ножного управления, включая блокировочные связи и аппаратуру, обеспечивающую безопасную работу пресса;
-цепи сигнализации и освещения.
При составлении принципиальной электрической схемы управления работой пресса, можно пользоваться элементарными схемами, которые представлены на рисунках.
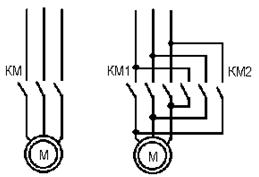 Рис.1. Схемы включения нереверсивного и реверсивного электродвигателей
Рис.1. Схемы включения нереверсивного и реверсивного электродвигателей
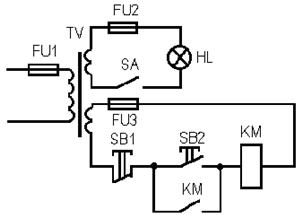 Рис.2. Трансформатор в цепях управления
Рис.2. Трансформатор в цепях управления
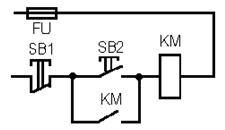 Рис. 3. Схема контакторного управления
Рис. 3. Схема контакторного управления
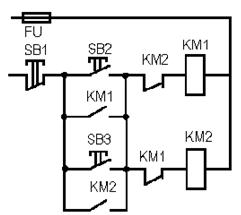 Рис. 4. Схема управления с использованием двух контакторов
Рис. 4. Схема управления с использованием двух контакторов
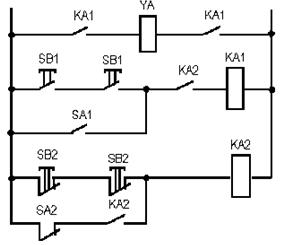 Рис. 5. Схема управления муфтой пресса
Рис. 5. Схема управления муфтой пресса
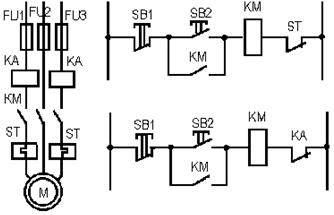 Рис. 6. Защита двигателя от перегрузок и токов короткого замыкания
Рис. 6. Защита двигателя от перегрузок и токов короткого замыкания
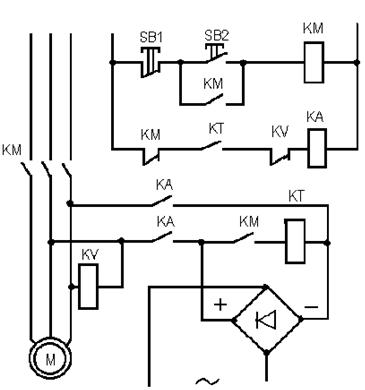 Рис. 7. Схема динамического торможения
Рис. 7. Схема динамического торможения
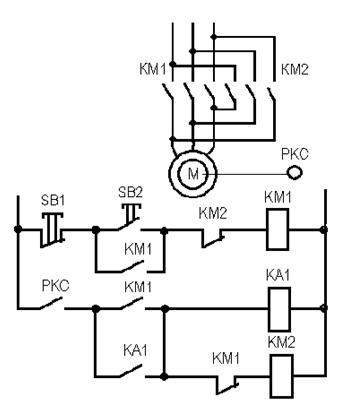 Рис. 8. Схема торможения противовключением
Рис. 8. Схема торможения противовключением
Таблица 1
Исходные данные для определения мощности двигателя и построения механической характеристики
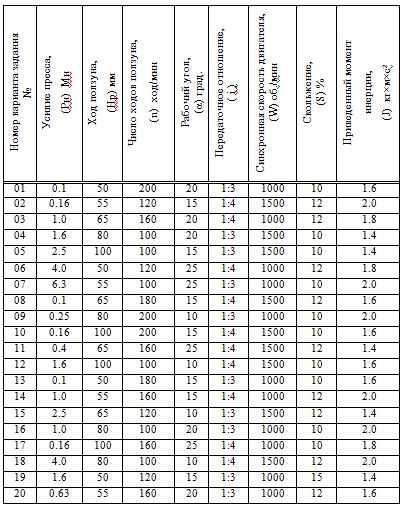 Таблица 2
Таблица 2
Исходные данные для построения принципиальной схемы управления прессом
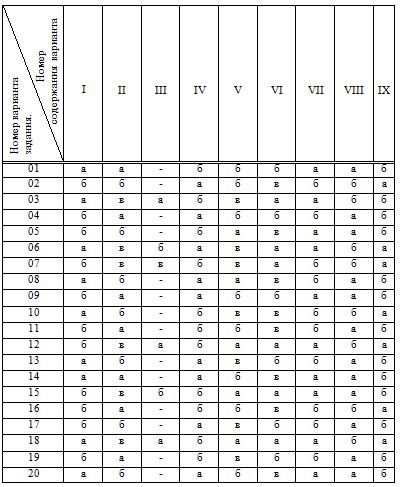 Таблица 3
Таблица 3
Исходные данные для выбора содержания варианта для таблицы 2
I. Предусмотреть управление работой пресса:
а – с одного пульта управления;
б – с двух пультов управления.
II. Тип электродвигателя:
а – асинхронный короткозамкнутый не реверсивный;
б - асинхронный короткозамкнутый реверсивный;
в – асинхронный с фазным ротором.
III. Число ступеней пуска для двигателя с фазным ротором:
а – одна;
б – две;
в – три.
IV. Защита электродвигателя от перегрузок и токов короткого замыкания:
а – с помощью автоматического выключателя и реле максимального тока;
б – с помощью теплового реле и плавких предохранителей.
V. Обеспечение световой индикации:
а – включения электродвигателя;
б – включение муфты пресса;
в – наличие напряжения в цепях управления.
VI. Наличие дополнительного торможения:
а – отсутствует;
б – торможение противовключением;
в – динамическое торможение.
VII. Двурукое управление работой муфты:
а – для одного оператора;
б – для двух операторов.
VIII. Наличие управление муфтой пресса от педали:
а – есть;
б – нет.
IX. Блокировка включения муфты в случае:
а – открытия дверцы кривошипно-шатунного механизма;
б – открытия дверцы рабочей зоны пресса.
>>>Далее>>>
|