2.4. Кинематический анализ механизма
2.4.1. Определение недостающих параметров кинематической схемы механизма (Производится по необходимости. Если все параметры кинематической схемы заданы, это указывается в п.2.4.1. Методика определения недостающих параметров схемы представлена в задании на проектирование).
В соответствии с заданием и /4/ находим φ1=
180/(K+1) = 180/(3+1) = 450, а из
ΔAB0C → lAB - lAB0 = L1/cosφ1 = 0,05/cos450 = 0,0707м; lDC = lD0c = 0,5S= =0,5•180=90мм=0,09м; lCS3 0,5•lDC=0,5•0,09=0,045м; lDE=(DE/DC)•lDC = 3•0,09=0,27м; lDC4 0,35lDC=0,35•0,09=0,0315м.
2.4.2. Построение планов положений механизма. Построение ведем в масштабе
| мl=0,001 |  |
Длины отрезков, изображающих заданные и (или) найденные длины звеньев механизма:
AB=lAB/μl=0,0707/0,001=70,7мм;
AC=L1/μl=0,05/0,001=50мм;
CD=lCD/μl=0,09/0,001=90мм;
DE=lDE/μl=0,27/0,001=270мм;
CS3=lCS3/μl
= =0,045/0,001=45мм;
DS4=lDS4/
μl=0,0315/0,001=31,5мм.
При построении кинематической схемы механизма сначала наносим на чертеже все неподвижные опорные элементы, затем вычерчиваем траекторию точки В кривошипа. Далее анализом определяем начальное (нулевое) положение этого кривошипа, соответствующее началу рабочего хода исполнительного звена 5 механизма. В рассматриваем случае начальное положение АВ0 входного звена АВ определяется
рисунком, иллюстрирующим расчеты по п.2.4.1. (производится обоснование начального положения заданного механизма). От точки В0 окружность кривошипа разбиваем на 12 равных частей; точки деления обозначаем как Вi при i=0…11 в направлении вращения кривошипа. Строим мгновенные положения АВi кривошипа; мгновенные положения остальных звеньев механизма в каждом i-ом положении звена 1 строим методом засечек (геометрических мест) /2/ в тонких линиях без изображения кулисных камней и ползунов. В заданном (не нулевом) положении механизма для его кинематического и силового анализа схему вычерчиваем жирными линиями, введя все обозначения звеньев и шарниров в соответствии с заданием.
2.4.3. Построение планов скоростей для нулевого и задаваемого положения № 1 механизма.
Для построения плана скоростей механизма 1-го класса находим скорость точки В1 кривошипа (звено 1)
|
|
•0,0707=0,35м•с-1 |
Т.к. отрезок
р̅w̅b1, изображающий
![]() , на плане скоростей должен составлять не менее 50мм, принимаем
р̅w̅b1=50мм и находим масштаб планов скоростей как
, на плане скоростей должен составлять не менее 50мм, принимаем
р̅w̅b1=50мм и находим масштаб планов скоростей как
 |
=0,35/50=0,007м•с-1/мм. |
Вектор
р̅w̅b1, перпендикулярный АВi и направленный в сторону
ω1, представляет собой план скоростей звена 1 в каждом i-ом положении механизма.
Для групп звеньев (2,3) – (3вид) – имеем систему векторных уравнений /2/
![]() , где
V̅E4=V̅E5
- абсолютная скорость
постоянно совпадающих в шарнире, образованном звеньями 4 и 5, точек Е4
и Е5 этих звеньев;
, где
V̅E4=V̅E5
- абсолютная скорость
постоянно совпадающих в шарнире, образованном звеньями 4 и 5, точек Е4
и Е5 этих звеньев;
![]() ;
;
![]() ;
;
![]() -
горизонтальная прямая
линии хода ползуна 5.
-
горизонтальная прямая
линии хода ползуна 5.
Решая эту систему, строим из pv правые части её уравнений.
Используя построенные планы скоростей механизма находим угловые скорости вращения звеньев механизма:
![]()
![]() ,
где
,
где ![]() ,
,
![]() -
отрезки планов скоростей в мм; ВС – отрезок из планов положений механизма.
-
отрезки планов скоростей в мм; ВС – отрезок из планов положений механизма.
Расчет значений угловых скоростей сводим в табл.1
Таблица 1
|
Положения механизма |
|
ВС, мм |
|
|
|
|
0 |
35 |
50 |
4,90 |
64 |
1,66 |
|
1 |
38 |
75 |
3,55 |
42 |
1,09 |
Определяя направления угловых скоростей звеньев в соответствии с /2/, показываем их круговой стрелкой на соответствующих планах положений механизма на листе.
2.4.4.Построение планов ускорений механизма
Абсолютное ускорение точек В1≡В2 при ω1=const
![]()
![]() .
.
Направлено
это ускорение от точки В к точке А кривошипа в каждом положении механизма.
Изображая на планах ускорений механизма
![]() отрезком
отрезком
![]() =60мм,
будем иметь масштаб планов ускорений
=60мм,
будем иметь масштаб планов ускорений
![]()
![]() .
.
Для группы звеньев (2,3) имеем систему векторных уравнений (группа 3-го вида - /2/)
![]() ,
,
где
![]() -
построенный вектор;
-
построенный вектор;
![]() -
(
-
(![]() -
отрезок плана скоростей в мм;
-
отрезок плана скоростей в мм;
![]() -из
табл.1);
-из
табл.1); ![]()
![]() ;
;
![]()
![]() -
(ВС и ω3 – из табл.1). Отрезки (мм),
изображающие рассчитанные ускорения на планах:
-
(ВС и ω3 – из табл.1). Отрезки (мм),
изображающие рассчитанные ускорения на планах:
![]() ;
;
![]()
![]() .
Расчеты по приведенным выше соотношениям для заданных положений механизма
приведены в табл.2
.
Расчеты по приведенным выше соотношениям для заданных положений механизма
приведены в табл.2
Таблица 2
|
Положение механизм |
|
|
м·с-2 |
ВС, мм |
м·с-2 |
|
|
|
0 |
4,90 |
35 |
2,40 |
50 |
1,22 |
80 |
41 |
|
1 |
3,55 |
32 |
1,72 |
75 |
0,95 |
57 |
32 |
В соответствии с /2/ строим планы ускорений группы (2,3) для заданных положений механизма.
Вектор, изображающий ускорение точки, в которой присоединяется группа (4,5),
находим по соотношению, полученному при построении планов скоростей:
![]() ,
в котором
,
в котором
![]() -
отрезок (в мм) построенного плана ускорений группы (2,3) в заданном
положении механизма. Для рассматриваемого механизма находим:
-
отрезок (в мм) построенного плана ускорений группы (2,3) в заданном
положении механизма. Для рассматриваемого механизма находим:
![]() -
для нулевого положения;
-
для нулевого положения;
![]() -для
первого положения. Строим на планах ускорений векторы
-для
первого положения. Строим на планах ускорений векторы
![]() как
продолжение отрезков
как
продолжение отрезков
![]() этих
планов.
этих
планов.
Для группы звеньев (4,5) имеем систему векторных уравнений (группа 2-го вида -/2/)
![]() ,
,
где
![]() изображается
на планах ускорений построенным вектором
изображается
на планах ускорений построенным вектором
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() параллелен
линии хода ползуна 5. Отрезки (в мм), изображающие расчетные ускорения на
планах:
параллелен
линии хода ползуна 5. Отрезки (в мм), изображающие расчетные ускорения на
планах:
![]()
![]() .
Расчеты по приведенным выше соотношениям для заданных положений механизма
приведены в табл.3.
.
Расчеты по приведенным выше соотношениям для заданных положений механизма
приведены в табл.3.
Таблица 3
|
Положения механизма |
с-1 |
|
|
ВС, мм |
|
|
мм |
|
|
0 |
1,66 |
0,744 |
25 |
50 |
39 |
23,4 |
71 |
7,88 |
|
1 |
1,09 |
0,321 |
11 |
75 |
20 |
8,0 |
35 |
3,88 |
В соответствии с /2/ строим планы ускорений группы (4,5) для заданных положений механизма.
По построенным планам ускорений находим угловые ускорения звеньев механизма:
![]() ,
т.к.
,
т.к. ![]() ;
;![]()
=![]() ;
;
![]() .
Расчеты по приведенным соотношениям для заданных положений механизма
представлены в табл.3. Определив, в соответствии с /2/, направления угловых
ускорений звеньев, указываем их круговыми стрелками на планах положений
механизма на листе.
.
Расчеты по приведенным соотношениям для заданных положений механизма
представлены в табл.3. Определив, в соответствии с /2/, направления угловых
ускорений звеньев, указываем их круговыми стрелками на планах положений
механизма на листе.
Ускорения центров масс звеньев механизма находим по следующему соотношению
![]() ,
где
,
где ![]() -
отрезки на планах ускорений, изображающие
-
отрезки на планах ускорений, изображающие
![]() ;
i
- номер звена. Положения
;
i
- номер звена. Положения
![]() на
планах ускорений находим с использованием свойств плана ускорений звена /2/
с помощью пропорций. Для рассматриваемого механизма будем иметь:
на
планах ускорений находим с использованием свойств плана ускорений звена /2/
с помощью пропорций. Для рассматриваемого механизма будем иметь:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
Расчеты по определению положений точек
.
Расчеты по определению положений точек
![]() -
концов векторов абсолютных ускорений центров масс звеньев для
рассматриваемых положений механизма сводим в табл.4.
-
концов векторов абсолютных ускорений центров масс звеньев для
рассматриваемых положений механизма сводим в табл.4.
Таблица 4
|
Положе ние механизма |
мм |
мм |
мм |
мм |
мм |
мм |
м·с-2 |
м·с-2 |
м·с-2 |
|
0 |
103 |
51,5 |
90 |
10,8 |
102 |
129 |
1,55 |
3,06 |
3,87 |
|
1 |
44 |
22 |
38 |
4,6 |
41,5 |
30 |
0,66 |
1,24 |
0,90 |
По
результатам этих расчетов строим положения точек
![]() для
i=1…5
на планах ускорений механизма и определяем для каждого из звеньев
для
i=1…5
на планах ускорений механизма и определяем для каждого из звеньев
![]() расчетами
в табл.4. При этом
расчетами
в табл.4. При этом
![]() ,
т.к. у рассматриваемого механизма
,
т.к. у рассматриваемого механизма
![]() ;
;
![]() .
.
2.4.5. Исследование кинематики механизма аналитическим методом
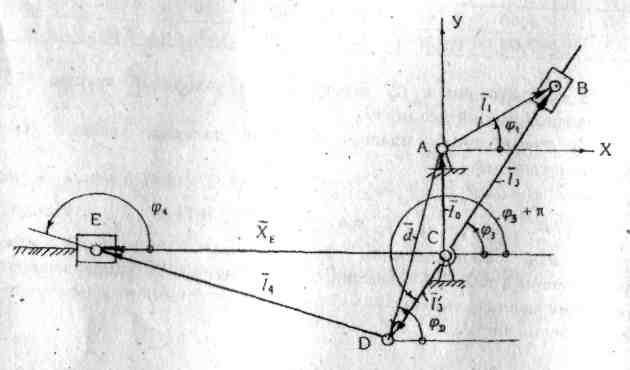
Это исследование сводится, прежде всего, к разработке алгоритма решения задачи о положениях звеньев механизма по методике, изложенной в /2/. Для этого рассмотрим схему механизма с указанием координат положения его звеньев (в пояснительной записке изображается схема заданного механизма с векторным представлением всех, за исключением ползунов и кулисных камней, его звеньев, с введением отсчитываемых против часовой стрелки углов, образованных этими векторами с положительным направлением оси х системы координат хАу)
Анализируя кинематику группы звеньев (2,3) – имеет 3-й вид – в
соответствии с /2/ выделяем замкнутый векторный контур АВСА,
уравнение замкнутости которого представляется как
![]() .
Проектируя это условие на координатные оси, получаем систему алгебраических
уравнений
.
Проектируя это условие на координатные оси, получаем систему алгебраических
уравнений
решением
которой по методике, изложенной в /2/, находим
![]() -
(1);
-
(1);
![]() -
(2).
-
(2).
выражения для расчета координат звеньев группы при любом φ1.
Для
определения координат точек присоединений следующей группы (точки
D)
рассмотрим замкнутый векторный контур
ACDA с уравнением
замкнутости
![]() .
Проектируя это уравнение на координатные оси получаем систему уравнений:
.
Проектируя это уравнение на координатные оси получаем систему уравнений:

решением
которой находим
![]() (3);
(3);![]() (4)
– координаты точки присоединения группы (4,5) как сложные функции φ1.
(4)
– координаты точки присоединения группы (4,5) как сложные функции φ1.
Анализируя кинематику группы звеньев (4,5) – имеет 2-й вид, -
выделяем замкнутый векторный контур
ADECA с уравнением
замкнутости
![]() .
Проектируя последнее на оси х,у, получаем
.
Проектируя последнее на оси х,у, получаем

Решением этой системы получаем
![]() -
(5);
-
(5);
![]() -
(6).
-
(6).
Уравнения (1)…(6) представляют алгоритм решения задачи о положениях звеньев рассматриваемого механизма. Решение задач о скоростях и ускорениях осуществляется на ЭВМ методом численного дифференцирования /2/.
2.4.6. Блок схема алгоритма кинематического анализа механизма на ЭВМ (см. приложение 2)
Эту
блок –схему изображаем в пояснительной записке. Раскрываем содержание блоков
этой схемы: - блок 1 – начало расчета; - блок 2 – ввод исходных (см. п.2.2);
блок 3 – определение недостающих параметров кинематической схемы механизма (см.
п.2.4.1.); блок 4 – расчеты координаты φ10 – угла φ1 (см.
рис. к п.2.4.5.) в нулевом положении механизма; блок 5 – организация цикла
расчетов по исследуемым положениям
i=0…11 механизма; блок 6 – расчет угла поворота
входного звена в i-м
положении механизма; блок 7 – организация цикла расчетов выходных координат
K=1…N,
определяющих положения звеньев механизма и их отдельных точек; блок 8 –
организация цикла трехкратного расчета каждой из выходных координат
Pk
при заданном φk
и его малых отклонениях ±∆φ1; блок 9 – расчет выходной координаты
Pk
по отдельной подпрограмме, разработанной с
помощью алгоритма в п.2.4.5.; блоки 10…17 – реализация алгоритма численного
дифференцирования для расчета аналогов скоростей
![]() и
ускорений
и
ускорений
![]() по
k-й
выходной координате; блок 18 – расчет скоростей и ускорений по
k-й выходной
координате; блок 19 – придание координате φ1 исходного её
значения; блок 20 – печать результатов по
k-й выходной координате и
возврат расчетов к циклу 7; блок 21 – печать номера исследуемого положения
механизма, после чего расчет переходит к циклу 5, с завершением которого
расчет переходит к силовому анализу механизма (см.
приложение 4).
по
k-й
выходной координате; блок 18 – расчет скоростей и ускорений по
k-й выходной
координате; блок 19 – придание координате φ1 исходного её
значения; блок 20 – печать результатов по
k-й выходной координате и
возврат расчетов к циклу 7; блок 21 – печать номера исследуемого положения
механизма, после чего расчет переходит к циклу 5, с завершением которого
расчет переходит к силовому анализу механизма (см.
приложение 4).
(Иллюстрация графической части работы по кинематическому исследованию механизма представлена в приложении 1).