2.3. Структурный анализ механизма
2.3.1. Определяем наименования звеньев
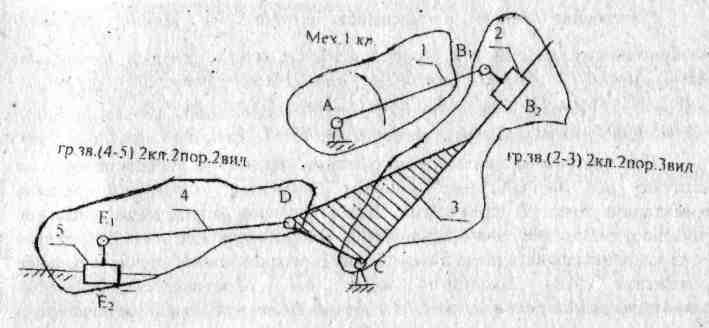
0 – стойка; 1- кривошип; 2 – кулисный камень; 3 – кулиса-кривошип; 4 – шатун; 5 – ползун.
2.3.2. Выделяем кинематические пары, их классифицируем
A(0,1); B1(1,2);
B2(2,3); C(0,3); D(3,4); E1(4,5); E2(0,5)
Все кинематические пары низшие, 5-го класса.
2.3.3. Определяем степень подвижности механизма,
W = 3n - 2p5 - p4 = 3.5 - 2.7 - 0 = 1,
где n=5 - число подвижных звеньев; p5=7 - число кинематических пар 5-го класса;
p4=0 - число кинематических пар 4-го класса.
2.3.4. Строим структурную схему заданного механизма, расчленяем её на механизмы первого класса и структурные группы (строится по заданной кинематической схеме механизма)
2.3.5. Определяем класс и порядок механизма:
Исследуемый механизм имеет II класс, 2 порядок
2.3.6. Записываем формулу строения исследуемого механизма
Мех-м II = м-м I (0,1)
→
гр II(2,3), 3вид
→ гр II(4,5), 2вид
2.3.7. Заключение структурного анализа исследуемого механизма:
Т.к. исследуемый механизм имеет второй класс, второй порядок, для его последующего кинематического исследования используем метод геометрических мест (метод засечек) для графического решения задачи о положениях; метод планов скоростей и ускорений для графоаналитического решения задач о скоростях и ускорениях; метод замкнутых векторных контуров для аналитического решения задачи о положениях; метод численного дифференцирования для аналитического решения задач о скоростях и ускорениях. Для силового анализа исследуемого механизма используется графоаналитический метод планов сил (метод Бруевича) и его аналитический аналог /4/.