2.6.1.Группа звеньев (4,5)
Изображаем схему группы с приложением всех усилий, которые обобщенно представляем в виде положительных проекции на оси хАу ранее введенной в п.2.4.5 системы координат:
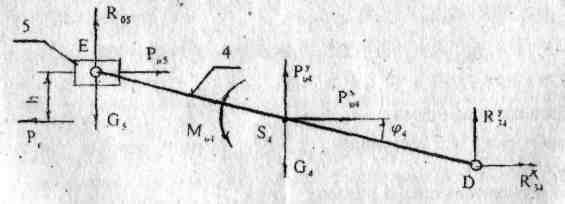
Усилия на звенья группы находим по соотношениям
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() -
(1)
-
(1)
Реализуя методику работы /3/ по силовому анализу структурной группы 2-го вида, рассмотрим условия равновесия группы в целом её отдельных звеньев:
![]()
![]()
![]() -
(2);
-
(2);
![]()
![]() -
(3);
-
(3);
![]()
![]()
![]() -
(4);
-
(4);
![]()
![]()
![]() -
(5);
-
(5);
![]()
![]()
![]() -
(6);
-
(6);
![]()
![]()
![]() -
(7).
-
(7).
2.6.2. Группа звеньев (2,3)
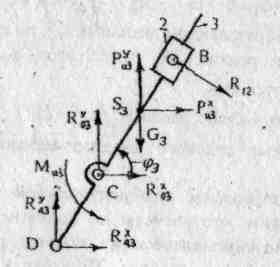
Изображаем группу звеньев с приложением всех усилий, которые также
представляем в виде положительных проекций на оси системы координат хАу.
Значения этих проекций определяем по уравнениям (1). Усилие со стороны звена
4 на звено 3 находим как ![]() ,
представляя на схеме
,
представляя на схеме ![]() в
виде положительных проекций
в
виде положительных проекций ![]() ;
;
![]() -
(8). Для рассматриваемого механизма на схеме группы (2,3) учтено,
что
-
(8). Для рассматриваемого механизма на схеме группы (2,3) учтено,
что
![]() .
.
Реализуя методику работы /3/ по силовому анализу структурной группы 3-го вида, рассмотрим условия равновесия группы и её отдельных звеньев:
![]() ,
откуда
,
откуда![]() -
(9);
-
(9);
![]() ;
;
![]() -
(10);
-
(10);
![]()
![]()
![]() -
(11);
-
(11);
![]()
![]()
![]() -
(12).
-
(12).
2.6.3.Механизм I класса
Изображаем схему механизма I класса,
прикладывая к звену 1 усилия ![]() ;
;
![]() -
(13);
-
(13); ![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
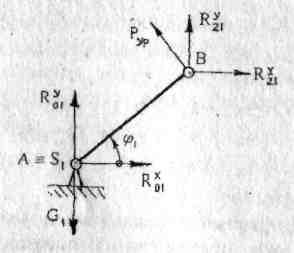
Реализуя методику работы /3/ по силовому анализу механизма I класса, рассмотрим условия равновесия звена 1:
![]()
![]()
![]() -
(14);
-
(14);
![]()
![]()
![]() -
(15);
-
(15);
![]()
![]()
![]() -
(16).
-
(16).
В
каждом шарнире, образованном звеньями
i,
j, по найденным расчетам
![]() ,
,
![]() результирующая
реакция
результирующая
реакция ![]() и
её угол φij
с положительным направлением оси х находятся как
и
её угол φij
с положительным направлением оси х находятся как
![]() ;
;
![]() -
(17)
-
(17)
2.6.4. Блок-схема алгоритма силового анализа механизма на ЭВМ (см. приложение 4)
Эту блок схему изображаем в пояснительной записке. Раскрывая содержание блоков, отметим, что расчеты по силовому анализу являются продолжением расчетов по кинематическому анализу, результаты которого служат исходными для силового анализа. Поэтому к циклу 22 расчеты переходят по завершении цикла 5 кинематического анализа. В цикле 22 осуществляется перебор звеньев механизма, для каждого из которых в блоке 23 рассчитывается сила веса. Блок 24 – цикл последовательного анализа положений механизма, для каждого из которых в блоке 25 организуется цикл рассмотрения звеньев механизма, для каждого из которых в блоках 26…28 производится расчет инерционных усилий. По завершении расчетов, в цикле 25 осуществляется переход к блоку 29, определяющему рабочее усилие Рс; в последующих блоках 30…32 производятся расчеты по алгоритму пп. 2.6.1…2.6.3. В блоке 33 осуществляется проверочный расчет Ру по аналитическому аналогу метода Н.Е.Жуковского, представленному в /3/. Блок 34 – печать результатов расчета для i-го положения механизма, после чего расчеты проводятся для следующего положения механизма в цикле 24. По завершении расчетов по этому циклу осуществляется переход к блоку 35 – конец расчетов.
(Иллюстрация графической части работы по силовому анализу механизма представлена в приложении 3)