4. Силовой анализ механизма.[5.стр.209-211]
Силовой анализ механизма позволяет найти усилия, действующие
на звенья механизма (необходимы для расчета звеньев механизма
на прочность) и уравновешивающее усилие (необходимо для подбора
мощности приводного двигателя). Этот анализ для заданного
положения механизма проводится мето¬дом планов сил в порядке,
обратном формуле строения механизма. Сначала рассчитывается
структурная группа 2-3, а затем механизм I-го класса.
Излагаемая ниже методика силового анализа
иллюстрируется примерами расчета для КПМ по данным табл.1.
4.1 Определение внешних усилий на звенья механизма.
Для КПМ по данным табл. I находим:
4.1.1. Веса звеньев (силы тяжести).
где g= 10м/с2 - ускорение силы
тяжести.
. 4.1.2. Силы инерции звеньев
4.1.3. Моменты пар сил инерции
4.1.4. Усилие полезного сопротивления
РС=900 Н (задается в табл. I).
1.2. Силовой анализ структурной
группы
Задачей этого анализа является
определение реакций в кинематических парах группы.
4.2.1. Силовой анализ структурной
группы 2-3 КПМ.
В масштабе вычерчиваем группу (рис.3a) в том положении, для
которого проводился кинематический анализ, для стандартного
масштаба

Прикладываем усилия, действующие на звенья
группы. Силы тяжести приложены в центрах масс S2
и C , направлены вертикально вниз. Здесь же приложены силы
_инерции РИ2 и РИ3.
Векторы этих сил параллельны векторам Pas2и
Pac(абсолютные ускорения центров масс),
но направлены в противоположную сторону. В точке С
параллельно направляющей приложена сила полезного сопротивления
РС, направленная противоположно вектору
Pvc. В кинематических парах В и С приложены
реакции отброшенных звеньев. Эти реакции неизвестны, поэтому
в кинематической паре В представим их в виде составляющих,
одна из которых направлена вдоль эвена BC (нормальная составляющая
Rn12) и вторая - перпендикулярна звену
BC (тангенциальная составляющая Rt12).
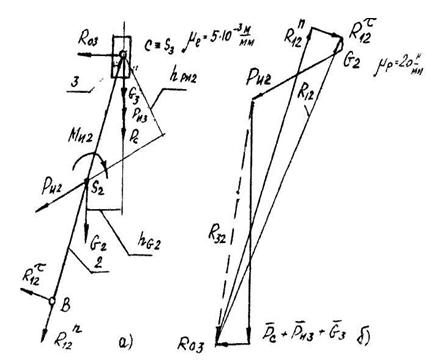
Рис.3 Структурная группа КПМ
с приложенными усилиями(а) и план сил группы (б).
Направление векторов этих составляющих выбирается произвольно.
Поскольку звено 3 совершает поступательное движение вдоль
неподвижной направляющей, реакция RО3
в паре С (3,0) направлена перпендикулярно направляющей, то
есть известна линия её действия (рис.3а)
Кроме инерционных сил РИ2
и РИ3 на звено действует момент пар
сил инерции МИ2, направление которого противоположно
направлению углового ускорения e2.
Согласно принципу Даламбера[5.стр.186] структурная
группа под действием приложенных нагрузок находится в равновесии.
Запишем условие равновесия группы в геометрической (векторной)
форме.
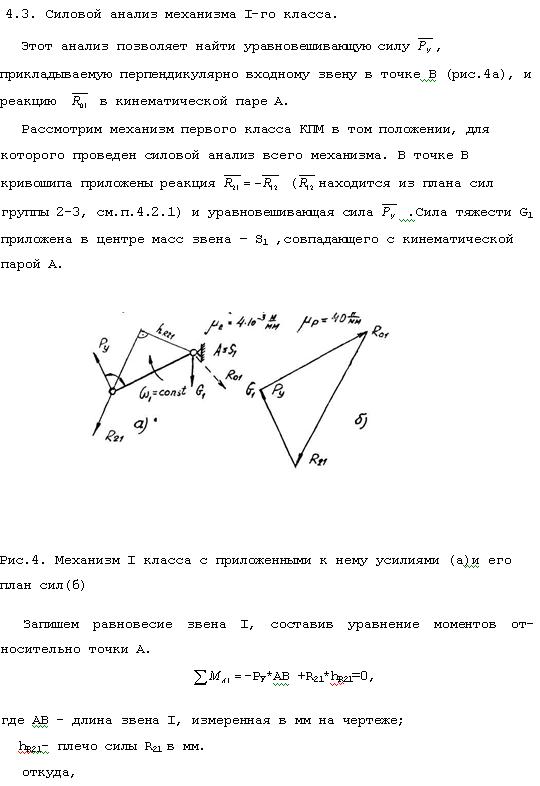
Составим уравнение моментов
относительно точки С для звена 2, уравнение равновесия имеет
вид:
откуда находим

где ВС - длина звена 2, измеренная
в мм на чертеже группы;
hРИ2- плечо силы РИ2
относительно точки С, это перпендикуляр, опущенный из точки
С на линию действия силы РИ2 (измеряется
на чертеже в мм);
hG2 -
плечо силы G2 в мм.
Так как Rx12<0,это усилие направляется
противоположно принятому на рис.3а.
Определив величину и направление силы Rx12,
решаем графически уравнение равновесия группы, то есть строим
план сил. Выбираем масштаб плана сил P. Он обычно выбирается
по наибольшей силе таким образом, чтобы вектор силы на чертеже
был 100*200 мм.
В нашем случае из действующих сил наибольшая сила РИ3
=2310 Н, выбираем отрезок II5,5 мм, тогда
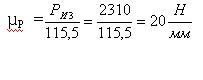
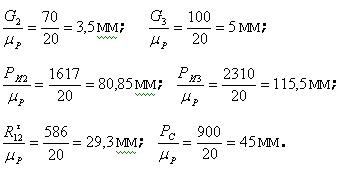
Вычисляем длины векторов, которыми
будут изображаться силы на плане сил в масштабе.
План сил строим в такой последовательности:
- проводим линию действия силы Rx12, то есть прямую параллельную
ВС;
- в произвольной точке прямой откладываем вектор силы Rx12(в нашем
случае отрезок 29мм) перпендикулярно прямой; его направление
противоположно принятому на чертеже(рис.За).
- из конца вектора Rx12откладываем
вектор G2(в нашем случае 3,5 мм) и т.д. в соответствии с векторным
уравнением равновесия, то есть складываем векторы геометрически;
-наконец, из конца вектора Pиз
проводим линию действия вектора Pоз(прямую, перпендикулярную
направляющей) до пересечения с линией действия вектора Rx12; точка
пересечения дает решение векторного уравнения равновесия группы.
Расставляем стрелки векторов
таким образом, чтобы векторы следовали один за другим, так
как их сумма равна нулю. Суммируя графически Rx12и
Rx12, находим величину реакции R12..
Из плана сил имеем, (измерив соответствующие векторы в мм):
Используем план сил (рис.3б)
и соединим конец вектора Pи2 с началом
вектора Rx12 . Получаем вектор R32(штриховая
линия). Этот вектор есть графическое решение векторного уравнения
равновесия звена 2. Определим величину R32,
измерив величину вектора в мм.

|



