3.Кинематический
анализ механизма.
3.1 Построение заданного положения механизма.
Выбираем стандартный масштаб (М 1:2, М 1:2,5; М 1:4 и др.)
таким образом, чтобы длина кривошипа АВ на чертеже была порядка
45-65 мм. В нашем примере удобен масштаб М 1:2,5 ,тогда длина
кривошипа lАВ = 150 мм на чертеже изобразится отрезком АВ=60
мм, длина шатуна- отрезком ВС=180мм.
Из точки А радиусом АВ вычерчиваем окружность-траекторию
точки В. Нулевым положением механизма считаем начало рабочего
хода ползуна, когда он расположен в точке Со, ближайшей к
точке А. Точка В в нулевом положении в зависимости от задания
может находиться на горизонтальной (задания ЭУ1,ЭУ2) или вертикальной
оси (задания ЭУ3,ЭУ4).Заданное положение механизма определяется
углом поворота кривошипа от нулевого положения. Например,
положение 1 соответствует углу поворота кривошипа АВ на 300,
положение 2- 600, положение 4 – 1200 .Построив заданное положение
точки В, делаем засечку радиусом ВС на горизонтальной (вертикальной)
оси и получаем положение точки С. Ползун строим произвольных
размеров в виде прямоугольника, длинная сторона которого параллельна
направляющей.
.
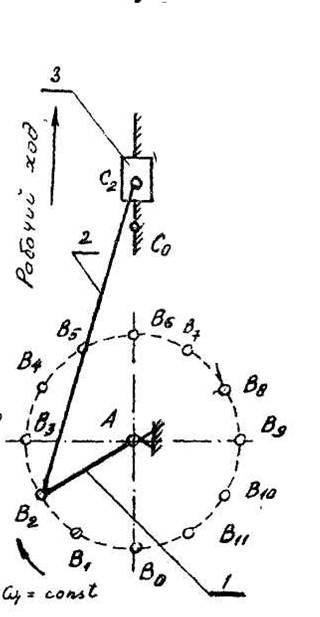
Рис.1. Заданное(№ 2) положение
механизма
3.2.1. Построение плана скоростей механизма
I класса.[5.стр92]
Угловая скорость кривошипа
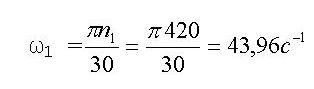
Принимаем ?1=44 с-1.
Скорость точки В , принадлежащей кривошипу,

где lAB=0,15-
заданная длина кривошипа в м.
Выбираем масштаб плана скоростей.
Пусть отрезок PVb , изображающий скорость
точки В на плане скоростей, равен 66 мм, тогда
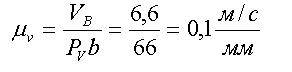
(длина отрезка PVb выбирается
произвольно в пределах от 60 до 120 мм так, чтобы имел одну
значащую цифру).
Для заданного положения КПМ (рис.2а)
из произвольно принятой точки PV(полюса плана скоростей) откладываем
вектор PVb (рис. 2б) перпендикулярно
кривошипу I в направлении его вращения. Этот вектор представляет
собой план скоростей механизма I-го класса в заданном положении
механизма.
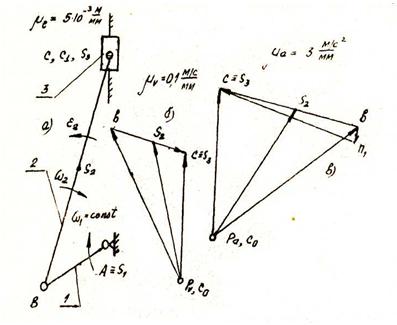
Рис. 2. Исследуемое положение КПМ(а), планы его скоростей
(б) и ускорений (в).
3.2.2. Построение плана скоростей
группы 2-3 КПМ.[5.стр.92-95]
Для заданного положения КПМ (рис.2а) определяем скорость шарнира
С, решая графически систему уравнений для группы 2-3.
где Vcb-скорость точки С
относительно точки В,
Vco=0 –скорость точки Со, принадлежащей
неподвижной направляющей.
Vcco- скорость точки С относительно точки Со
.
Для решения этой системы из точки b плана скоростей (конец
вектора VB) проводим прямую, перпендикулярную
ВС (линия действия VcB ). Учитывая,
что и конец совпадает с PV , проводим
из PV прямую, параллельную направляющей (линия действия Vcco)
Точка пересечения построенных линий действия двух векторов
скоростей ( , ) определяет на плане скоростей положение точки
С (рис.2б). Вектор PvC-
искомое решение системы уравнений группы 2-3. Полученный треугольник
PVbc является планом скоростей механизма
в рассматриваемом положении. - вектор абсолютной скорости
точки С, - вектор относительной скорости .
Точки S2 и S3 - центры масс звеньев
2 и З соответственно, Точка S2 расположена посередине
звена ВС. Чтобы найти её абсолютную скорость, воспользуемся
свойством подобия планов.
Итак, точка s2 лежит
посередине вектора . Соединяя точку s2 с полюсом
Pv, получаем вектор -абсолютную скорость точки S2.
Точка s3совпадает с точкой С.
Определяем скорости точек звеньев
где Pvc,bc Psub>vs2,
, - отрезки (в мм), измеренные на построенном плане скоростей.
Определяем величину угловой скорости
где lCB ~ заданная длина звена
CB в м.
Определяем направление угловой
скорости звена CB . Для определения направления вектор bc,
изображающий относительную скорость VCB
, из плана скоростей переносим параллельно самому себе в точку
С звена 2. Этот вектор вращает звено вокруг точки В по часовой
стрелке -это направление угловой скорости.
3.3.1 Построение плана ускорений
механизма I-го класса.[5.стр.190]
Так как ?1 =const, угловое ускорение Е1=
О ; соответственно тангенциальная составляющая atВА
= Å1* lAB
=0 и абсолютное ускорение точки В кривошипа

Выбираем масштаб плана ускорений.
Пусть отрезок ,изображающий ускорение точки В на плане ускорений,
равен 97 мм, (Длина отрезка выбирается произвольно от 60 до
130 мм так, чтобы имел одну значащую цифру).
Для заданного положения механизма
(рис.2а) откладываем вектор параллельно кривошипу I, направив
его к центру вращения кривошипа, то есть в сторону точки А
звена (рис.2в). Этот вектор представляет собой план ускорений
механизма I-го класса в заданном положении исследуемого механизма.
3.3.3. Построение плана ускорений группы 2-3 КПМ.[5.стр.190-191]
Записываем систему векторных уравнений для определения ускорения
точки С группы 2-3.
 |
- нормальная и тангенциальная составляющие
от¬носительного ускорения точки С вокруг точ¬ки В;
- ускорение точки СО, принадлежащей
непод¬вижной направляющей;
- ускорение поступательного движения звена 3 относительно
стойки (направляющей).
|
Определяем величину нормальной составляющей

Вычисляем длину вектора, изображающего
нормальную составляющую на плане ускорений

Этот вектор проводим из точки
b построенного плана ускорений механизма I-го класса параллельно
звену ВС, направляя его от точки С к точке В звена ВС (рис.2в).
Из точки n1 строим прямую, перпендикулярную
ВС в заданном положении механизма. Из полюса Ра
проводим прямую, параллельную линии хода ползуна 3. Точка
с пересечения построенных линий действия двух ускорений- решение
системы уравнений.
Соединяя точки b и c плана ускорений, находим вектор bc, изображающий
полное относительное ускорение acb.
Находим Pas2(точка
S2 лежит посередине ), и определяем
ускорения точек звеньев механизма
где  отрезки
(в мм), измеренные на плане ускорений (рис.2в) отрезки
(в мм), измеренные на плане ускорений (рис.2в)
Угловое ускорение звена 2
Определяем направление углового
ускорения звена 2. По аналогии с угловыми скоростями переносим
вектор n1c, изображающий тангенциальную
составляющую ускорения точки С относительно точки В, в точку
С звена 2 .Вектор n1c
вращает звено 2 вокруг точки В против часовой стрелки. Звено
3 движется поступательно. В рассматриваемом положении механизма
звено 2 вращается замедленно (направления e2 и w2 противоположны),
звено 3 - движется ускоренно (направления Pac
и Pvc совпадают).
|



