
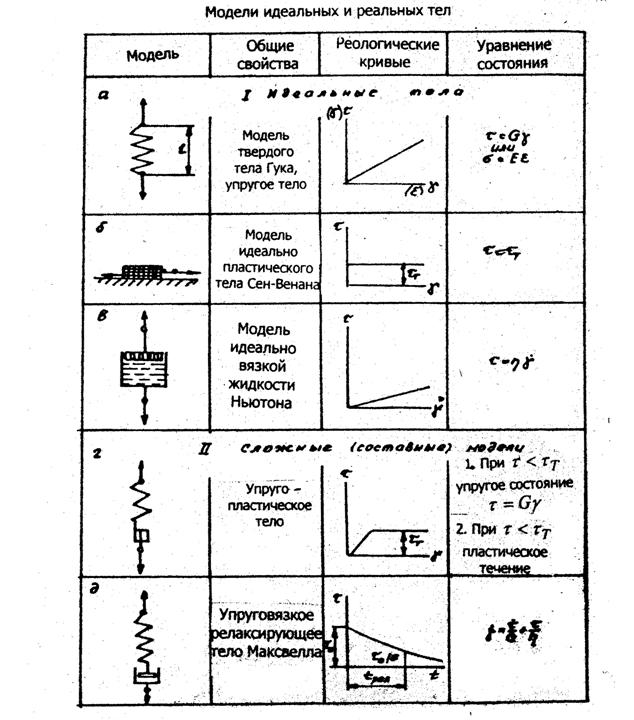
Моделирование реологического поведения тел
Идеальные тела. Это понятие условное, в природе таких нет, но они приняты как отправной пункт при рассмотрении и описании поведения реальных материалов, составляющих те или иные комбинации свойств идеальных тел.
Известно три вида идеализированных материалов:
- идеально-упругое тело Гука;
- идеально-пластическое тело Сен-Венана;
- идеальная вязкая жидкость Ньютона.
Упругое тело является консервативной системой, т.е. энергия, затрачиваемая на деформацию, накапливается в теле и может быть возвращена при разгрузке.
Вязкая жидкость и пластическое тело являются диссипативными системами: механическая энергия, затраченная на работу преодоления внутреннего трения и на пластическую деформацию, превращается в теплоту.
В упругом теле напряженное состояние связано с мгновенной деформацией, а в вязкой жидкости и пластических телах с мгновенным состоянием течения. В случае вязкого течения затрачиваемая механическая энергия зависит от скорости деформации, в случае пластического течения - не зависит.
3.1. Идеально-упругое тело Гука

Идеально-упругое тело Гука (см. табл.1.1 п.а) - это упругое тело, подчиняющееся закону Гука, для одномерной задачи может быть описано уравнением:
где s - нормальное напряжение;
E - модуль упругости;
e - линейная деформация.
Таблица 1.1.
Деформация возрастает непосредственно после приложения нагрузки, скорость распространения деформации мгновенна (реально во всех материалах - со скоростью распространения волн в среде). Если рассматривать деформацию призмы, находящейся под действием сдвигающего (касательного) напряжения, приложенного к верхней грани, то закон Гука принимает вид:

где t - касательное напряжение;
G - модуль сдвига;
g - угол сдвига или градиент смещения.
Модуль сдвига G связан с модулем упругости (растяжение-сжатие) Е зависимостью:

где m - коэффициент Пуассона.
Моделью идеального упругого тела Гука может служить спиральная пружина.
3.2. Идеально-пластическое тело Сен-Венана
Идеально-пластическое тело Сен-Венана (см. табл.1.1. п.б). Поведение его, под нагрузкой, следующее: до тех пор, пока величина приложенного к нему напряжения лежит ниже некоторого критического значения предельного напряжения сдвига sт (tт) (предела текучести), материал остается жестким; в тот момент, когда напряжение достигает предела текучести, начинается пластическое течение материала при постоянном напряжении (примером является пластилин).
Модель идеально пластического тела Сен-Венана может быть представлена в виде элемента, лежащего на плоскости, с постоянным по величине трением, не зависящем от нормальной силы. Статический и кинематический коэффициенты трения принимаются равными. Тело не начинает двигаться до тех пор, пока напряжение сдвига не превысит предельного напряжения сдвига. После этого элемент может двигаться с любой скоростью. Реологическое уравнение будет иметь вид:

где t - касательные напряжения;
tт - касательные напряжения течения (предельное напряжение сдвига, предел текучести).
3.3. Идеальная вязкая жидкость Ньютона

Идеальная вязкая жидкость или Ньютоновская жидкость (см. табл.1.1, п.в) может быть представлена моделью в виде перфорированного поршня, перемещающегося в цилиндре с жидкостью. Модель характеризуется тем, что в ней напряжения пропорциональны скорости деформации, поэтому реологическое уравнение имеет вид:
где h - коэффициент вязкости;
g’ - скорость сдвига.
3.4. Сложные или составные модели
Для моделирования реальных тел, обладающих всеми реологическими свойствами в неодинаковой степени, можно комбинировать моделями идеальных тел в различных сочетаниях. К составлению моделей нужно относится с осторожностью, иначе попытка отразить все многообразие свойств приводит в весьма сложным и, поэтому неприемлемым, реологическим моделям. В некоторых случаях реологическая модель может удовлетворительно отражать свойства реальных тел только в определенных интервалах изменения температуры, влажности, давления и других параметров. За пределами этих интервалов поведение реального тела вследствие изменения его свойств может сильно расходиться с составленной моделью.
Модели идеальных тел могут соединяться между собой параллельно или последовательно. При параллельном соединении нагрузка складывается из нагрузок ветвей, а скорости удлинения элементов одинаковы. При последовательном соединении нагрузка на элементы одинакова, а величина перемещения складывается из перемещений составляющих элементов.
3.5. Упруго-пластическое тело
Упруго-пластическое тело (см. табл.1.1,п.г) получается при последовательном соединении упругого и пластического элементов.
При t < tт имеет место упругое состояние, при котором t = Gg; при t = tт наступает состояние пластического течения.
3.6. Упруго-вязкое релаксирующее тело Максвелла
Упруго-вязкое тело Максвелла (см. табл.1.1,п.д) представляет собой последовательное соединение моделей гуковского и ньютоновского тел.
Из условия, что суммарная деформация ? равна сумме деформаций упругого ?У и вязкого ?? элементов, с учетом зависимостей 1.4 и 1.7 имеем:

Дифференциальное уравнение данного тела:

Интегрируя это уравнение, получим его решение

где t0 - напряжение в начальный момент времени (t=0).
Если мгновенно загрузить рассматриваемое тело и считать, что в момент t=0 приложено напряжение t0, то непосредственно после нагрузки тела вязкая деформация равна нулю и деформация тела равна полной упругой деформации:


Если после этого обеспечить неизменность во времени этой деформации, т.е. g = g0, то g = 0, тогда дифференцируемое уравнение примет вид:
Откуда, интегрируя, находим:

Отметим, что


и
определяется - Tрел период релаксации, как время, за которое напряжение упадет в е раз. При увеличении t напряжение t уменьшиться, при t тело переходит в ненапряженное состояние.
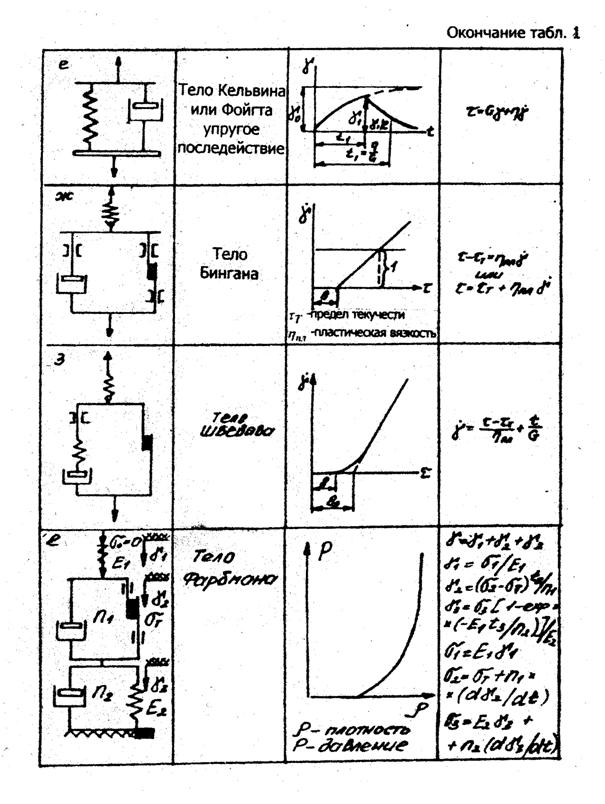
3.7. Тело Кельвина или Фойгта

Тело Кельвина или Фойгта (см. табл.1.1,п.е) получается при параллельном соединении упругого и вязкого элементов. В этом случае суммарное напряжение равно сумме напряжений ty и tВ, и деформация упругого элемента равна деформации вязкого элемента

Учитывая, что ty = gG и tВ = hg' получим:

Интегрируя это уравнение, найдем общее решение:
где g0 - деформация в начальный момент времени (t=0).


Рассмотрим случай, когда начальная деформация g0 = 0, а приложенное напряжение t0 постоянно, тогда уравнение примет вид:
Из исходного уравнения следует, что модель тела Кельвина-Фойгта для описания процесса релаксации не приемлема, т.к. при фиксированной деформации (g=const) следует, что g’=0, а t=const, т.е. напряжение при постоянной деформации не уменьшается, а остается неизменным. Тем не менее, модель тела Кельвина-Фойгта подходит для описания других процессов. Рассмотрим это.
Из последнего уравнения видно, что по мере увеличения времени t деформация возрастает и асимптотически приближается к величине t0/G. Следовательно, деформация тела Кельвина-Фойгта не развивается мгновенно, а задерживается вследствие упругого последействия. Величина G/h характеризует скорость затухания деформации и может быть названа коэффициентом затухания.
Если в течение времени t=t1 , снять нагрузку, которая была приложена при t=0, то в решении дифференциального уравнения при t>t1 следует принять t=0, тогда получим
После разгрузки кривая асимптотически приближается к нулю.
Постепенное нарастание деформации при постоянной нагрузке, характеризующейся первой ветвью кривой или последовательное уменьшение деформации после снятия нагрузки, как это было уже сказано в § 2.2, называется упругим последействием или эластичностью.
3.8. Вязко-пластическое тело Бингама-Шведова
Примером вязко-пластического тела Бингама-Шведова (см. табл.1.1,п. ж,з) является раствор желатина (мармелад, желе, студень). Раствор желатина релаксирует отлично от максвеловских тел и постоянно сохраняет небольшое остаточное напряжение сдвига (q), ?т.
Из других веществ, например, масляная краска есть пластическое тело с таким низким пределом текучести, что давления кисти достаточно для того, чтобы она начала течь как жидкость, но при небольшой толщине слоя собственного ее веса недостаточно, чтобы она могла стекать с вертикальной стенки и тогда она ведет себя как твердое тело.
Бингам для таких материалов получил реологическое уравнение:

где tТ – предельное напряжение сдвига;
hпл - пластическая вязкость;
?’ – скорость сдвига.
Шведов (для желе) получил уравнение вида:

Модель Шведова отличается от модели Бингама тем, что параллельно телу Сен-Венана присоединено тело Максвелла, а у Бингама - тело Ньютона.

В соответствие со схемой можно написать:

где tm - напряжение в максвеловском элементе, для которого

или
3.9. Тело Фарбмана
Многие авторы при исследовании свойств пищевых материалов использовали и другие реологические модели (см. табл.1.1,п.е).
Заслуживает внимание реологическая модель тела из спрессованных длиннофрагментных и стебельчатых насыпных материалов типа чайного листа, лекарственных растений, макаронных полуфабрикатов и др. В результате прессования выше упомянутых материалов Фарбман Г.Я. определил, что можно отметить три этапа.
На первом - из системы вытесняется воздух, деформация происходит при ничтожно малых нагрузках. После снятия нагрузки деформации не снимаются. На кривой давления прессования (Р)- плотность (r), участок первого этапа происходит вблизи от оси абсцисс.
Второй этап характеризуется интенсивным развитием упруго-пластических деформаций и быстрым увеличением давления прессования.
На третьем этапе сжимается уже сформированный монолит, в котором преобладают упругие деформации при резко возрастающем давлении. После снятия нагрузки деформации снимаются с некоторым запаздыванием во времени, что связано с наличием упругого последействия (эластичности).
Для описания этих процессов Фарбман предложил трехзвенную реологическую модель, в которой первый этап прессования моделируется пружиной Е1, малой жесткости - телом Гука с защелкой на конце, второй этап - звеном, состоящим из соединенных параллельно тел Ньютона (h1) и Сен-Венана (sТ). Первое и второе звенья вместе составляют упругое вязкое пластичное тело Бингама. Деформации в таком теле после снятия нагрузки не исчезают, и в нем сохраняются остаточные напряжения. Третий этап моделируется звеном (тело Кельвина), состоящим из соединенных параллельно тел Ньютона (h2) и Гука (Е2).

Представленная модель позволяет рассмотреть весь процесс сжатия материала, суммарная деформация которого составляет:
Первое звено - упругое тело. Напряжение прямо пропорционально деформации s1 = Е1g1.

Второе звено - вязкопластическое тело. Тело Сен-Венана ведет себя как твердое тело, и не начнет деформироваться до тех пор, пока напряжения в нем не превысят предел текучести sт (либо предельное напряжение сдвига tт). При s = sт тело начнет течь с некоторой скоростью. После этого вступает в действие тело Ньютона, испытывая напряжение h1(dg2/dt). Таким образом, суммарные напряжения в звене:
где t – время деформации.

Третье звено - упруго вязкое тело Кельвина, в котором общее напряжение равно сумме напряжений от упругих деформаций sу и вязкого течения sв, т.е.
Решая уравнение суммарной деформации, и учитывая, что скорость деформации dg/dt=g’= =const, t=0, s0=0 находятся выражения для величины деформации каждого звена модели.

Первое звено:

Второе звено:
Третье звено:

Численные значения характеристик реологических свойств находят из экспериментальных диаграмм "напряжение Р – деформация g" и рассчитывают по выше приведенным формулам.
3.10. Построение обобществленных моделей тел со сложной комбинацией свойств
Можно составить и более сложные сочетания упругих и вязких элементов. При увеличении числа упругих и вязких элементов и усложнении схем их соединения можно получить весьма сложные законы деформирования.
К. Хоэнэмзер и В. Прагер предложили обобщенное линейное тело с реологическим уравнением
a0 + a1s + a2s+ a3g + a4g’ = 0 (1.34), где s – напряжение;
g – деформация;
g’- скорость деформации;
a0 , a1 , a2 , a3 , a4 – эмпирические коэффициенты.
Для более общего случая уравнение будет иметь вид:

где b0 , b1, b2 – эмпирические коэффициенты.
Анализируя данные эксперимента можно сделать выводы о структуре этого сложного тела:
- Свободный член соответствует наличию тела Сен-Венана;
- Порядок деформационного уравнения получается не больше числа вязких элементов схемы;
- Отсутствие упругой непрерывной связки в схеме указывает на то, что при длительном действии нагрузки деформация неограниченно возрастает;
- В схемах с упругой непрерывной связью при длительном действии нагрузки деформация стремиться к некоторому предельному значению, соответствующему "длительному модулю упругости", величина которого может быть определена по схеме при исключении из нее всех вязких элементов;
- При быстром приложении нагрузки деформация определяется "мгновенным" модулем упругости: его можно получить из схемы, полагая, что все вязкие элементы жесткие.
