|
5.4 Современные интеллектуальные датчики
Как было сказано выше, структура ИД состоит из двух взаимосвязанных блоков: чувствительного элемента(сенсора) и преобразователя. Последний комплектуется из программируемого микропроцессора с оперативным и постоянным модулем памяти, аналого-цифрового преобразователя, сетевого контроллера связи с типовыми полевыми сетями. Как сенсор, так и преобразователь датчика, обычно, имеют ряд вариантов исполнения, рассчитанных на различные свойства измеряемой окружающей среды.
Большинство производителей комплектуют датчики из сочетания разных вариантов сенсоров с разными вариантами преобразователей, рассчитанных на работу с данной серией сенсоров, благодаря этому удается наиболее точно и полно удовлетворить отдельным конкретным требованиям к прибору.
В последнее время получают распространение мультисенсорные датчики, когда к одному преобразователю подключается ряд сенсоров, воспринимающих различные или однотипные величины.
Еще одним из примеров служит бесконтактный интеллектуальный датчик углового положения (индикатор углового положения) (рис. 33). Изготавливается по техническим условиям ШЮГИ.401261.001 ТУ, согласованным 1 ЦНИИ Минобороны России.

Датчик предназначен для использования при определении углового положения вала и может быть непосредственно использован для определения углового положения лопаток впускного направляющего аппарата газотурбинного двигателя в системе автоматического управления, а также для других целей, в качестве преобразования угла в поворот вала в код.
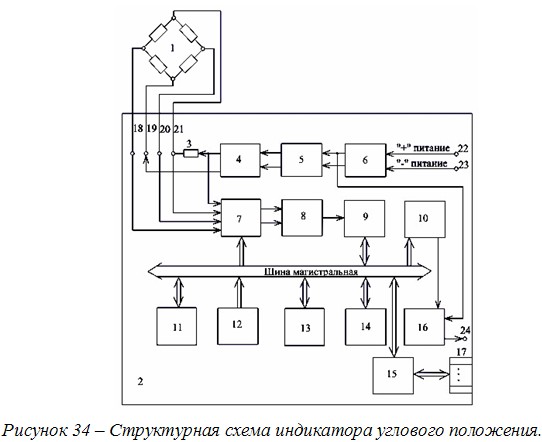
На рис. 34 показана структурная схема бесконтактного интеллектуального датчика углового положения:
На этом рисунке 1 – полномостовой магниторезистивный чувствительный элемент (разработка и изготовление ФГУП НПО автоматики, использован патент РФ RU2084912C1). 2 – печатная плата. 3 – измерительный резистор. 4 – прецизионный источник опорного напряжения. 5 – регулятор напряжения. 6 – защита от обратного и перенапряжения. 7 – мультиплексор. 8 – инструментальный усилитель. 9 – аналого-цифровой преобразователь (АЦП). 10 – цифро-аналоговый преобразователь (ЦАП). 11 – микроконтроллер. 12 – постоянное запоминающее устройство (ПЗУ). 13 – оперативное запоминающее устройство (ОЗУ). 14 – Flash-память. 15 – интерфейс. 16 – преобразователь напряжения в ток. 17 – разъем печатной платы 2. 18, 19, 20, 21, 22, 23, 24 – контактные площадки печатной платы 2.
Питание от внешнего источника постоянного тока напряжением 27В ± 10%поступает на контактные площадки 22, 23 печатной платы 2 датчика. Выходной аналоговый сигнал (4 … 20 мА) через контактную площадку 24 печатной платы 2 датчика поступает в систему автоматизированного управления. Печатная плата 2 и чувствительный элемент 1 закрепляются на неподвижной части (статоре) датчика. Магниты закрепляются на подвижной части (роторе) датчика.
Датчик с использованием полномостового магниторезистивного чувствительного элемента и измерительного резистора имеет следующие достоинства:
Высокая стабильность измерений с течением времени;
Линейная характеристика во всем температурном диапазоне.
Датчик работает следующим образом: Питание от внешнего источника постоянного тока через узлы 6, 5, 4 и измерительный резистор 3 поступает на выводы питания полномостового магниторезистивного элемента 1. По командам микроконтроллера 11 попеременно с выводов измерительного резистора 3 и с выходных выводов полномостового магниторезистивного чувствительного элемента 1 величины напряжений через мультиплексор 7 передаются на инструментальный усилитель 8, где производится нормирование снятых величин. Затем аналоговая информация поступает в АЦП 9, где производится оцифровка аналоговой информации, которая поступает на микроконтроллер 11. По результатам двух измерений микроконтроллер 11 по программе датчика формирует результирующую цифровую информацию, которая поступает в ЦАП 10, где производится преобразование цифровой информации в аналоговую.
Затем аналоговая информация (напряжение) поступает на преобразователь напряжения в ток 16 с выхода которого точная аналоговая информация в виде тока (4 … 20 мА) поступает в систему автоматизированного управления.
Предлагаемая схема датчика имеет диапазон измерения контролируемого угла поворота от 0 до 55°. Абсолютная погрешность определения углового положения составляет не более 1°. При использовании двух полномостовых магниторезистивных чувствительных элементов диапазон измерения контролируемого угла поворота составляет от 0 до 180°.
Таким образом, интеллектуальные датчики – это гибкий, экономичный, универсальный инструмент сбора и обработки информации, позволяющий существенно повысить точность и эффективность измерений, являющийся, на сегодняшний день, новым этапом развития автоматизированных интегрированных измерительных систем и комплексов.
|


