|
4.1. Классификация датчиков положения и основные требования к ним.
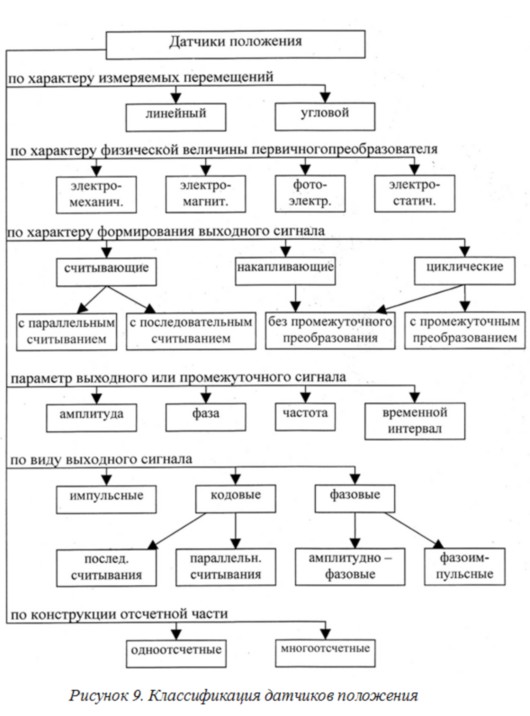
Датчики положения разнообразны по числу используемых физических эффектов и набору вариантов конструктивных решений. Они различаются на датчики угловых (?) и линейных (x) перемещений (рис. 9).
Угловые и линейные преобразователи строятся с использованием одних и тех же физических принципов и одинаковых методов измерения; отличия между этими группами преобразователей сводятся только к особенностям конструктивных решений, связанных с наличием элементов, совершающих в одном случае - поступательное, в другом - вращательное движение.
По характеру физической величины преобразования параметров технологического процесса в электрическую величину датчики положения могут быть классифицированы на электромеханические, электромагнитные, фотоэлектрические и электростатические (имеется в виду тип ПП).
Электромеханические датчики основаны на изменении активного сопротивления в функции перемещения или положения исполнительных или рабочих органов. Ввиду присущих этим датчикам недостатков (износ контактов, возникновение электрической дуги при коммутации, относительно большие моменты на валу и тому подобное) в информационных системах электроприводов эти датчики применяются относительно редко.
В электромагнитных датчиках измерительная информация формируется посредством изменения его магнитных характеристик и, как следствие этого, электрических параметров (индуктивных сопротивлений обмоток, ЭДС). Датчики этого типа нашли достаточно широкое распространение в системах обратной связи электроприводов металлорежущих станков, что объясняется высокой надежностью и помехозащищенностью электромагнитных датчиков, фазовой, в большинстве случаев формой представления выходного сигнала, относительной дешевизной.
К датчикам этого типа относятся не только широко известные датчики типа вращающийся трансформатор (ВТ), редуктосин, сельсин, индуктосин, но и различные их разновидности. Фотоэлектрические датчики, принцип действия которых основан на изменении электрических параметров фотоприемника (сопротивление, ток, проводимость) в зависимости от величины светового потока, который, в свою очередь, является функцией положения рабочих или исполнительных органов АО, обладают высокой чувствительностью, относительно малыми габаритами и наряду с электромагнитными датчиками нашли широкое применение в информационных системах электроприводов.
Кроме широко известных электромагнитных и фотоэлектрических датчиков положения, ведутся и разработки других типов датчиков информационных систем - электростатических, ионизационных, а также датчиков принципиально новых типов, например, датчиков угла протонно-прецизионного типа, обеспечивающих погрешность измерения угла 0.5 секунд и реализующих принцип квантовой магнитометрии. Однако в реальных системах управления электроприводами эти датчики в настоящее время широкого распространения не получили.
По характеру формирования выходного сигнала ДП могут быть классифицированы на считывающие, накапливающие и циклические.
В преобразователях считывания измеряемая величина одновременно сопоставляется с набором эталонных мер всех возможных числовых эквивалентов. Происходит выборка определенного значения, равного измеряемому с определенной погрешностью. По этому принципу конструируются, например, кодовые фотоэлектрические ДП, причем считывание кода может быть в параллельной или последовательной форме. Накапливающие ДП реагируют на пространственное перемещение, которое с помощью специальной схемы разделяется на ряд элементарных приращений. Преобразователь накапливает эти приращения и с помощью метода последовательного счета формирует ПДК, пропорциональный измеряемой величине. Основной недостаток таких ДП в накапливании одновременно с измеряемой величиной погрешности за весь период измерения.
В отличии от накапливающих циклические ДП осуществляют измерение перемещения за фиксированный цикл, причем в каждом цикле проводится преобразование всей измеряемой величины, а не ее приращения, и ошибка фиксируется только в одном цикле. В циклических ДП обычно используется промежуточное преобразование перемещения во временной интервал, амплитуду, частоту, фазу.
По способу формирования выходного сигнала датчики положения могут быть подразделены на импульсные, кодовые и фазовые.
В импульсных датчиках положения выходной сигнал формируется в виде импульсов, количество которых соответствует величине перемещения.
В фазовых датчиках перемещение приводит к периодическому изменению фазы выходного сигнала по линейному закону от 0 до 360 градусов.
В амплитудно-фазовых датчиках сдвиг по фазе определяется посредством анализа соотношения амплитуд опорного и выходного сигналов, то есть посредством амплитудно-модулированного по положению исполнительного или рабочего органов станка сигнала. В этих датчиках необходимо обеспечить высокое постоянство амплитуды и формы опорного и выходного сигналов. В противном случае возникают дополнительные погрешности измерения, характерные для аналоговых датчиков.
В фазоимпульсных датчиках сдвиг по фазе определяют посредством заполнения импульсами стабилизированной частоты временного интервала между реперными точками опорного и выходного сигналов, например, началом периода, с последующим счетом числа этих импульсов. При этом кроме погрешности формирования реперных точек в этих датчиках возникает и погрешность, связанная с динамической погрешностью перемещения органов станка.
В кодовых датчиках положения выходной сигнал формируется в виде кода, определяемого состоянием чувствительного элемента (электропроводимость, освещенность и тому подобное) в каждом разряде. При этом в датчиках последовательного считывания производится последовательный опрос всех чувствительных элементов по разрядам двоичного числа, а в датчиках параллельного считывания - одновременный по всем дорожкам кодирования диска. Применение того или иного способа считывания обуславливается требуемым временем съема информации.
По конструкции отсчетной части ДП делятся на одноотсчетные и двух (много)отсчетные. Многоотсчетный принцип построения измерительных систем с ДП обусловлен противоречивыми требованиями, к ним предъявляемыми при использовании ДП в системах путевого контроля АО. К измерительной системе при этом предъявляются требования сочетания высокой разрешающей способности (до 1 мкм) с большой величиной контролируемого перемещения (до 1 м и более). В большинстве случаев в информационно-измерительной системе не обходятся одним измерительным преобразователем - ДП, а применяют многоотсчетные измерительные системы, состоящие из 2-3 каналов отсчета. При этом одно устройство (точное) обеспечивает однозначность отсчета с большой разрешающей способностью на малой длине (например, для индуктосина 2.54 мм или 15°), а второе (грубое) устройство позволяет определить зону измерения в пределах всего перемещения.
По одноотсчетному принципу строят преобразователи на 8-14 двоичных разрядов (с погрешностью до единиц угловых минут), по многоотсчетному - до 20 разрядов (с погрешностью до единиц угловых секунд). Причем, если в одноотсчетном ДП измеряемая величина однозначно связана, например, с фазой выходного сигнала ПП пропорциональной зависимостью, то в двухотсчетном ДП выходные показания складываются из показаний - датчика грубого и точного отсчетов.
В зависимости от требуемой точности измерительные системы, к которым относится датчик, можно разбить на пять классов. Первые три класса (с погрешностью отсчета 0.01 мм и выше) часто выполняются двухотсчетными (два канала отсчета - грубый и точный), а последние два класса (от 0.05 мм) — одноотсчетными.
Грубые отсчетные устрйства, входящие в измерительные системы 1-Ш классов, при точности отсчета 0.025-0.05 мм могут служить самостоятельными измерительными, системами IV-V классов.
Грубые отсчетные устройства при измерении линейных перемещений включают обычно два узла - преобразователь линейного перемещения в круговое и круговой преобразователь. Преобразователь линейного перемещения в круговое обычно строят на основе силовых элементов привода перемещения исполнительных органов (например, пары ходовой винт-гайка) или на базе специальных измерительных элементов, имеющих отсчетную механическую (измерительная рейка-шестерня), гибкую электрическую, или другую связь с исполнительными органами. Круговой измерительный преобразователь выбирается с учетом требований точности, надежности и других требований для каждого случая измерения [ ].
Требования к датчикам можно разделить на конструктивные, включающие в себя такие параметры, как габарит, масса, пространственное положение; эксплуатационные — максимальная скорость контролируемых перемещений, максимальная величина контролируемых перемещений, выходные электрические параметры и др.; метрологические, основные из которых — погрешность и дискретность. Конструктивные требования обусловлены как типом самого преобразователя, так и типом оборудования, в котором он применяется.
Эксплуатационные и метрологические требования аналогичны требованиям ко всем датчикам цепей ОС, проанализированным в 3.2.
Датчики, датчики положения должны быть надежны, долговечны и экономичны.
|


