

|
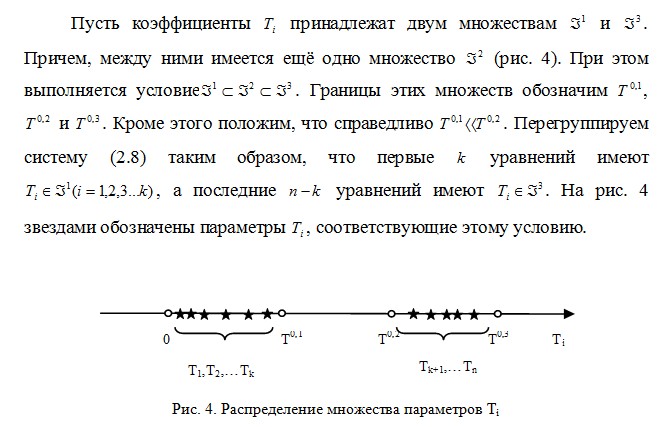
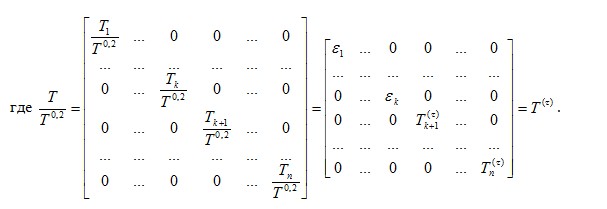
2.2.3. Пути преодоления «проклятия размерности». При описании динамики реальных объектов управления в полном объеме необходимо привлекать уравнения достаточно высокого порядка. Например, при построении систем управления процессами обработки на станках токарной группы даже в упрощенном варианте необходимо иметь систему дифференциальных уравнений 27 – го порядка [10]. В связи с этим возникает проблема, каким образом анализировать пространство состояния такой размерности. Такие примеры можно приводить при анализе различных объектов управления. Достаточно привести еще пример. Для описания движения одного твердого тела мы должны иметь дифференциальное уравнение двенадцатого порядка. Проблема анализа и синтеза систем высокого порядка особенно актуальна для нелинейных систем. В данном случае речь идет не столько о точности линейной и нелинейной аппроксимации, а о качественном отличии свойств системы. Именно в нелинейных системах в окрестностях некоторых стационарных траекторий, определяемых управлением, возможно существование различных многообразий. Среди них необходимо выделить орбительно асимптотически устойчивые предельные циклы (то есть автоколебания), формирование - мерных инвариантных торов (то есть - частотных стационарных состояний), образование странных аттракторов (то есть детерминированных траекторий, имеющих свойства хаотических колебаний). Все эти многообразия формируются исключительно в нелинейных системах. Кроме этого в нелинейных системах свойства системы зависят от рассматриваемых областей в пространстве состояний, а одному и тому же управлению в зависимости от начальных условий могут соответствовать различные траектории и свойства системы. Проблема анализа и синтеза сложных нелинейных систем известна уже с пятидесятых годов прошлого века. В связи с этим в математике, а затем в теории автоматического управления стал развиваться подход, основанный на принципе разделения движений. Основы этого принципа положены в работах А.Н.Тихонова и Л.С.Понтрягина [11, 12]. Применительно к теории автоматического управления принцип разделения движений разработан Геращенко Е.И. [13]. Изложим идеи этого метода элементарным способом. Для этого вновь обратимся к анализу системы общего вида, которую будем считать системой с постоянными параметрами, то есть к системе вида 
Л.С. Понтрягиным показано, что при условии, когда решение (2.12) является асимптотически устойчивым, то траектории В целом, вместо системы n- го порядка анализируются две иерархически связанные подсистемы «медленного» и «быстрого» времени соответственно k - го и n-k - го порядков. При рассмотрении реальных систем анализ существенно упрощается, так как управляющих воздействий, физически реализуемых, существенно меньше, а взаимосвязь между координатами упрощена. Принципиально, после анализа объекта управления и связи в нем между координатами состояния возможно параметры системы, стоящие при производных, разбивать на несколько групп. Тогда в соответствие исходной системе дифференциальных уравнений можно поставить несколько иерархических уровней подсистем по принципу «медленности» времени. Второе направление анализа нелинейных систем автоматического управления связано с разработанной теорией асимптотических методов нелинейной динамики. Истоки этого метода лежат в работах А.Пуанкаре и М.А. Ляпунова. Основные положения этого метода сформулированы, развиты и доказаны Н.М.Крыловым, Н.Н.Боголюбовым и Ю.А. Митропольским [13, 14]. Однако необходимо признать, что все идеи метода принадлежат, в основном, Анри Пуанкаре. |
 характеризуют притягивающее многообразие, то есть аттрактор. Таким образом, Анализ и синтез управления в системе (2.8) заменяется исследованием и синтезом управления в подсистеме «медленного» времени с последующим анализом асимптотической устойчивости траекторий в подсистеме «быстрого» времени.
характеризуют притягивающее многообразие, то есть аттрактор. Таким образом, Анализ и синтез управления в системе (2.8) заменяется исследованием и синтезом управления в подсистеме «медленного» времени с последующим анализом асимптотической устойчивости траекторий в подсистеме «быстрого» времени. 