| Указания
к выполнению п.2.2.
Как было сказано выше, программа позволяет проводить моделирование двумя
способами:
- при ручном управлении каждым из кранов (режим
САУ);
- при автоматическом управлении кранами 1 и 2
(режим АСУ).
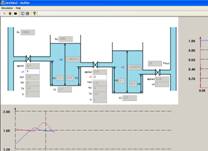
В режиме САУ из всех параметров модели
доступными для пользователя остаются только степени открытия кранов u1 и u2
(см. рис.5). Данный режим полезен для проведения моделирования САУ в статическом
режиме, т.е. когда степени открытия постоянны, давление входного и
выходного коллекторов также постоянны, и накопление жидкости происходит
до расчётного установившегося значения в каждой из ёмкостей.
Однако на практике стремятся как можно больше сократить
время наполнения (восстановления запасов) жидкости в ёмкостях, не уменьшая
при этом выходной напор. Эта задача невыполнима при статическом
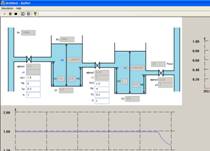
управлении, поэтому предусмотрен также режим «АСУ», реализующий
регулирование уровней H1 и H2 по ПИД-закону (формула
(6)). В режиме «АСУ» пользователю становятся доступны параметры настройки
ПИД-регуляторов и номинальных значений уровня
(см.рис.6):
Hz1, Hz2 – задающие воздействия для регуляторов;
Kп –
коэффициент пропорционального звена;
Tд –
коэффициент дифференцирующего звена;
Tи – коэффициент интегрирующего звена.
|
|
|
|
Рис.5.Функционирование программы в режиме «САУ»
|
Рис.6.Функционирование программы в режиме «АСУ»
|
|



