Методические указания к выполнению лабораторных работ
Лабораторная работа № 4
ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ НАСТРОЕК
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА
Цели работы: проведение анализа влияния настроек пропорционально-интегрального регулятора на качественные показатели замкнутой системы, получение навыков параметрической оптимизации настроек промышленных регуляторов.
Программа работы
1. Создать модель замкнутой САУ путём замены П- на ПИ-регулятор в модели разомкнутой системы, созданной в предыдущей работе.
2. Определить зависимость качественного изменения переходной характеристики от количественного изменения параметров ПИ-регулятора. Результаты занести в таблицу вида табл.1.
2.1. Задавшись начальными значениями коэффициента передачи ПИ-регулятора (kП) и постоянной времени интегрирования (TИ), снять характеристики модели замкнутой САУ.
2.2. Варьируя значения коэффициента передачи ПИ-регулятора (kП) при неизменной величине постоянной времени интегрирования (TИ), определить, при каком значении kП переходный процесс замкнутой системы будет иметь минимальное значение времени регулирования. Параметры всех шагов поиска зафиксировать, отразить в таблице результатов, снять характеристики САУ при данных значениях параметров ПИ-регулятора.
2.3. Зафиксировав значение kП, найденное на предыдущем шаге, и варьируя значение постоянной времени интегральной составляющей (TИ), определить такое сочетание обоих параметров, при котором система будет иметь минимальное время регулирования. Параметры всех шагов поиска зафиксировать, отразить в таблице результатов, снять характеристики САУ при данных значениях параметров ПИ-регулятора.
3. Сформулировать выводы о проделанной работе.
Результаты опыта
Таблица 1
Опыт № |
1 |
2 |
3 |
… |
Коэффициент передачи ПИ-регулятора, kП |
|
|
|
|
Постоянная времени интегрирования, TИ, с |
|
|
|
|
Произведение параметров kПTИ |
|
|
|
|
Установившееся значение |
|
|
|
|
Время регулирования, TрегС |
|
|
|
|
Показатель колебательности |
|
|
|
|
Перерегулирование |
|
|
|
|
Указания к выполнению работы
К.п.1. Структурная схема модели может выглядеть так, как показано на рис.1а и 1б: блок 1 ПИ-регулятор, блоки 2 и 3 – составляющие объекта управления ОУ1 и ОУ2, блок 4 – звено единичной обратной связи.
а |
|
Рис.1. Схема исследуемой модели:
а – для получения переходного процесса,
б – для получения ошибки регулирования.
Передаточные функции блоков №2 «ОУ 1» и №3 «ОУ 2» приведены в следующей форме:
![]() ,
, ![]() .
.
где значения коэффициентов С1, С2, С3, С4, С5, С6 для каждого звена выбираются из таблицы 2 согласно номеру варианта задания.
К п.2. Передаточная функция ПИ-регулятора имеет следующий вид:
![]() . (1)
. (1)
Варьировать значения коэффициентов kП и TИ ПИ-регулятора следует в числителе и знаменателе блока 1. Для этого преобразуем ПФ ПИ-регулятора (1) в выражение, пригодное для ввода в Classic:
![]() , (2)
, (2)
а затем в соответствии с (2) распределим значения по параметрам звена (см. рис.2). На рис.2 значение kПTИ = 0.001 внесено в числитель, в строку слагаемого первого порядка, в строку слагаемого нулевого порядка введена единица. В параметры знаменателя записано значение TИ=10 (слагаемое первого порядка), а слагаемое нулевого порядка обнулено. Таким образом, получено звено, описывающее ПИ-регулятор в пакете Classic.
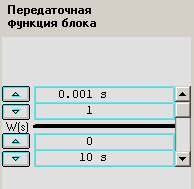
Рис.2. Пример ввода параметров ПИ-регулятора
Варианты заданий
Таблица 1
№ п/п |
Коэффициенты ПФ ОУ 1 |
Коэффициенты ПФ ОУ 2 |
||||
С1 |
С2 |
С3 |
С4 |
С5 |
С6 |
|
0,001 |
0,012 |
1 |
0,690 |
0,438 |
1 |
|
1,960 |
0,763 |
1 |
2,150 |
0,678 |
1 |
|
0,710 |
0,408 |
1 |
0,880 |
0,472 |
1 |
|
2,130 |
0,673 |
1 |
3,260 |
0,950 |
1 |
|
0,100 |
0,131 |
1 |
0,090 |
0,169 |
1 |
|
0,050 |
0,102 |
1 |
0,010 |
0,045 |
1 |
|
0,160 |
0,182 |
1 |
0,060 |
0,120 |
1 |
|
0,990 |
0,514 |
1 |
1,230 |
0,557 |
1 |
|
1,390 |
0,741 |
1 |
0 |
0,219 |
0 |
|
0,123 |
0,070 |
1 |
0 |
0,810 |
0 |
|
0 |
0,755 |
0 |
1,500 |
0,986 |
1 |
|
0 |
0,698 |
0 |
2,200 |
0,863 |
1 |
|
0,200 |
0,181 |
1 |
0,439 |
0,917 |
0 |
|
1,200 |
0,643 |
1 |
0,467 |
0,674 |
0 |
|
0,178 |
0,219 |
0 |
0,009 |
0,104 |
1 |
|
0,281 |
0,810 |
0 |
0,040 |
0,070 |
1 |
|
0,243 |
0,986 |
1 |
0 |
0,755 |
0 |
|
0 |
0,863 |
0 |
0,052 |
0,698 |
1 |
|
0 |
0,917 |
1 |
0,093 |
0,181 |
0 |
|
0,093 |
0,435 |
0 |
0 |
0,643 |
1 |
|
0,080 |
0,674 |
1 |
0,130 |
0,722 |
0 |
|
0,052 |
0,479 |
1 |
0,063 |
0,516 |
0 |
|
0,025 |
0,350 |
0 |
0,003 |
0,126 |
1 |
|
0,003 |
0,119 |
0 |
0,120 |
0,705 |
1 |
|
0 |
0,045 |
1 |
0,002 |
0,286 |
1 |
|
0 |
0,520 |
1 |
0,001 |
0,111 |
1 |
|
10-5 |
0,057 |
1 |
0 |
0,894 |
1 |
|
7x10-4 |
0,104 |
1 |
0 |
0,029 |
1 |
|
10-4 |
0,070 |
1 |
1,2x10-3 |
0,216 |
1 |
|
5,7x10-4 |
0,104 |
1 |
2x10-5 |
0,029 |
1 |
|
1,22x10-4 |
0,070 |
1 |
0,007 |
0,216 |
1 |
|
0,100 |
0,755 |
1 |
0,003 |
0,207 |
1 |
|