Методические указания к выполнению лабораторных работ
Лабораторная работа № 3
ИЗУЧЕНИЕ ТИПОВЫХ АЛГОРИТМОВ УПРАВЛЕНИЯ
В ТЕХНИЧЕСКИХ СИСТЕМАХ
Цели работы: изучить свойства типовых законов преобразования сигналов в системах управления, определить влияние значений настроек составных регуляторов на качество управления.
Программа работы
1. Повторить приёмы работы в пакете моделирования Classic 3:
1.1. Формирование проекта отдельного динамического звена.
1.2. Ввод и изменение его параметров.
1.3. Проведение связей между блоками.
1.4. Назначение "входов" и "выходов" модели.
1.5. Построение характеристик моделируемой системы.
2. Исследовать типовые линейные законы преобразования сигналов:
2.1. Создать новый проект.
2.2. Создать модель в пакете Classic, содержащую три ветви: П-, И- и Д-составляющие.
2.3. Ввести параметры звеньев модели согласно варианту задания.
2.4. Исследовать модель в случае, когда сигнал преобразуется по пропорциональному закону: снять переходные характеристики при различных входных воздействиях.
2.5. Снять характеристики модели при преобразовании сигнала только по интегральному закону: произвести те же действия, что и в п.2.4.
2.6. Промоделировать систему в случае, когда используется только дифференциальный закон преобразования входного сигнала: повторить действия п.2.4.
2.7. Исследовать варианты составных законов преобразования сигнала: ПД, ПИ, ПИД тем же способом, что и предыдущие элементарные законы.
3. Сформулировать выводы о проделанной работе.
Указания к выполнению работы
К п.2.1-2.3. Основные приёмы работы в пакете моделирования САУ Classic 3 изложены в методических указаниях для лабораторной работы № 1а, поэтому здесь рассмотрим лишь возможный вариант модели.
Например, структурная схема модели для проведения исследований типовых законов регулирования может выглядеть так, как показано на рис.1. Здесь блоки 1-3 предназначены для ввода параметров П-, И- и Д-составляющих соответственно. Блоки 4-6 служат "выключателями" - в числитель их передаточных функций вводится 1 в случае, если соответствующий параметр присутствует в законе управления, и 0 – в противном случае.
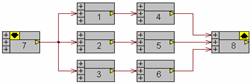 Рис.1. Общий вид схемы модели в пакете Classic |
В поле "Атрибуты:" для блока 7 устанавливаем значение "Вход", для блока 8 – "Выход". В поле "Передаточная функция блока" вводим параметры регуляторов согласно вариантам задания (табл.1). Строки над толстой линией соответствуют порядку слагаемого числителя, под линией – знаменателя.
Объект управления (блок №8) представляет собой инерционное звено 1-го порядка с передаточной функцией вида: ![]() . Параметры ОУ приведены в таблице 2 и вводятся в блок №8.
. Параметры ОУ приведены в таблице 2 и вводятся в блок №8.
В случае пропорционального и дифференцирующего звеньев необходимо в знаменатель ПФ обязательно ввести единицу! Если же звено интегрирующее, то будет достаточно ввести постоянную времени в строку под линией, соответствующую первому порядку знаменателя.
К п.2.4-2.7. Последовательность действий при исследовании законов преобразования сигналов:
- П-регулятор – определить реакцию модели на ступенчатое и линейное входные воздействия, с оценкой влияния kП на ошибку регулирования и быстродействие;
- ПД-регулятор – то же, что и для П-регулятора. Дополнительно оценить влияние дифференциальной составляющей на быстродействие и на поведение ошибки регулирования в начальный момент времени;
- И-регулятор – при ступенчатом входном воздействии исследовать влияние TИ на быстродействие и точность. При линейно-изменяющемся входном сигнале определить, возможно ли получение устойчивого решения. Исследовать возможность построения устойчивой системы, проанализировав переходный процесс, полученный при параболическом входном сигнале;
- ПИ-, ПИД-регулятор – методика исследования аналогична описанной для И-регулятора, с дополнительным исследованием влияния П- и Д-составляющих закона регулирования там, где они есть.
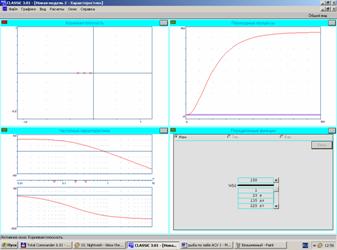
Рис.2. Общий вид окна характеристик модели
Для получения характеристик модели необходимо выбрать пункт главного меню "Расчёты/Характеристики", или нажать клавишу F9. В результате откроется окно вида рис.2. Если необходимо скопировать графики, то следует выбрать пункт меню "Вид/Копировать" (или Ctrl+C).
Нажав ПКМ на любом из графиков, открываем меню вида рис.3. Здесь с помощью пунктов "Параметры…" и "Тип…" можно изменить свойства и внешний вид графиков. Пункт "Показатели качества (сводка)" (Ctrl+I) выведет на экран те показатели качества САУ, которые можно определить с помощью соответствующей характеристики.
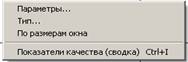 Рис.3. Контекстное меню графического окна |
Кликнув ПКМ на графике "Переходные процессы" и выбрав пункт меню "Тип...", можно изменить тип характеристики, выбрав соответствующее входное воздействие (см.рис.4). Аналогичным образом можно изменить набор отображаемых графиков в окне "Частотные характеристики" (рис.5).
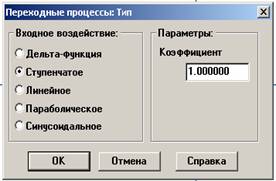
Рис.4. Окно выбора типа входного воздействия
Рис.5. Окно выбора типа частотных характеристик
Варианты заданий
Таблица 2
№ |
Коэффициент передачи пропорционального звена, kП |
Постоянная времени интегрирования, |
Постоянная времени дифференцирования, TД |
Постоянная времени ОУ, TOY |
0.438 |
0.012 |
0.070 |
0.001 |
|
0.678 |
0.763 |
0.755 |
0.002 |
|
0.472 |
0.408 |
0.698 |
0.003 |
|
0.950 |
0.673 |
0.181 |
0.004 |
|
0.169 |
0.131 |
0.643 |
0.005 |
|
0.045 |
0.102 |
0.100 |
0.006 |
|
0.120 |
0.182 |
0.772 |
0.007 |
|
0.557 |
0.514 |
0.307 |
0.008 |
|
0.219 |
0.741 |
0.012 |
0.009 |
|
0.810 |
0.070 |
0.763 |
0.01 |
|
0.986 |
0.755 |
0.438 |
0.02 |
|
0.863 |
0.698 |
0.678 |
0.03 |
|
0.917 |
0.181 |
0.472 |
0.04 |
|
0.674 |
0.643 |
0.950 |
0.05 |
|
0.104 |
0.219 |
0.169 |
0.06 |
|
0.070 |
0.810 |
0.045 |
0.07 |
|
0.755 |
0.986 |
0.120 |
0.08 |
|
0.698 |
0.863 |
0.557 |
0.09 |
|
0.181 |
0.917 |
0.219 |
0.1 |
|
0.643 |
0.435 |
0.810 |
0.2 |
|
0.722 |
0.674 |
0.438 |
0.3 |
|
0.516 |
0.479 |
0.678 |
0.4 |
|
0.126 |
0.350 |
0.472 |
0.5 |
|
0.705 |
0.119 |
0.950 |
0.6 |
|
0.286 |
0.045 |
0.169 |
0.7 |
|
0.111 |
0.520 |
0.045 |
0.8 |
|
0.894 |
0.057 |
0.120 |
0.9 |
|
0.029 |
0.104 |
0.557 |
1 |
|
0.216 |
0.070 |
0.219 |
2 |
|
0.207 |
0.755 |
0.810 |
3 |
.