Методические указания к выполнению лабораторных работ
Лабораторная работа № 2
Исследование фундаментальных свойств
замкнутых автоматических систем
Цели работы: 1) показать достоинства и недостатки замкнутого принципа управления по отклонению, 2) оценить качественное изменение системы после замыкания обратной связи, 3) на примере замкнутой САУ наглядно показать переход количественных изменений в качество.
Программа работы
1. Ознакомиться с основными приёмами работы в программе для моделирования САУ Classic 3:
1.1. Формирование проекта отдельного динамического звена.
1.2. Ввод и изменение его параметров.
1.3. Проведение связей между блоками.
1.4. Назначение «входов» и «выходов» модели.
1.5. Построение характеристик моделируемой системы.
2. Построить модель замкнутой системы, состоящей из П-регулятора, ОУ в виде двух типовых звеньев второго порядка и единичной обратной связи, ввести параметры модели в соответствии с вариантом задания.
3. Определить зависимость количественных оценок качественного изменения ПП САУ от величины коэффициента П-регулятора. Для этого:
3.1. Установить начальное значение kП = 1 и снять характеристики модели САУ. Результаты занести в таблицу вида табл.1.
3.2. Увеличивая kП , определить, при каком значении kПa-k переходный процесс системы вместо апериодического вида примет колебательный характер. Зафиксировать данное значение коэффициента, отразить его в таблице результатов, снять характеристики САУ при kПa-k.
3.3. При дальнейшем варьировании kП, переходный процесс системы будет принимать всё более ярко выраженный колебательный характер. Необходимо отразить это на графиках переходных процессов замкнутой САУ при соответствующих значениях kП.
Результаты опыта
Таблица 1
|
Установившееся |
Установившаяся ошибка регулирования, |
Время регулирования, tрег , с |
Показатель
колебательности, |
Перерегулирование, |
Вещественный корень ХП, s1 |
Комплексные корни ХП, s2 |
kПнач |
… |
|
… |
… |
… |
|
|
… |
… |
|
… |
… |
… |
|
|
M |
M |
|
M |
M |
M |
|
|
kПa-k |
… |
|
… |
… |
… |
|
|
M |
M |
|
M |
M |
M |
|
|
kПк-н |
… |
|
… |
… |
… |
|
|
3.4. По достижении некоторой величины kПк-н, переходная характеристика замкнутой системы управления станет близкой к автоколебательному виду, а затем (после превышения данного порогового значения kП=kПк-н) замкнутая система станет неустойчивой. Определить означенное выше пороговое значение kПк-н, снять основные показатели качества замкнутой САУ (табл.1).
4. Отразить изменения характера переходных процессов модели замкнутой САУ при соответствующих значениях kП на графиках зависимостей:
- установившегося значения от kП ;
- установившейся ошибки регулирования от kП ;
- времени регулирования от kП ;
- перерегулирования от kП ;
- показателя колебательности ПП от kП ;
- значения наименьшей вещественной части корня ХП от kП .
5. Сформулировать выводы о проделанной работе: определить порядок астатизма системы, применимость П-регулятора для исследуемой системы, и т.д.
Указания к выполнению работы
К п.2. Возможный вид структурной схемы модели выглядит так, как показано на рис.1а и 1б. Здесь блок 1 является П-регулятором, блоки 2 и 3 – составляющие объекта управления ОУ1 и ОУ2, блок 4 – звено единичной обратной связи.
а |
б |
Рис.1. Схема исследуемой модели:
а – для получения переходного процесса,
б – для получения ошибки регулирования.
Передаточные функции блоков №2 «ОУ 1» и №3 «ОУ 2» для упрощения процедуры ввода параметров приведены в следующей форме:
![]() ,
, ![]() .
.
Значения C1, C2, C3, C4, C5, C6 выбираются из таблицы 2 согласно номеру варианта задания.
К п.3. Варьировать значение коэффициента П-регулятора следует в параметрах блока 1, а точнее – в числителе его передаточной функции (см. рис.2).

Рис.2. Варьирование коэффициента обратной связи
Необходимо обращать внимание на тип переходного процесса. При различных вариантах заданий и значениях kП он может быть и апериодическим (как с небольшим перерегулированием, так и без него), и колебательным; при некотором значении kП система станет неустойчивой. Необходимо определить, при каких значениях kП происходят качественные перемены свойств САУ, и зафиксировать значения её показателей качества в таблице 1.
Прямые показатели качества модели замкнутой САУ можно определить по графику «Переходные процессы»: это перерегулирование и время регулирования, а также установившееся значение регулируемой величины. Делается это нажатием ПКМ на окне графика «Переходные процессы» и выбором пункта контекстного меню «Показатели качества (сводка)».
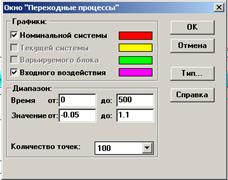 Рис.3. Окно свойств графика переходного процесса |
В случае, если необходимо изменить масштаб графика, следует изменить максимальные значения осей графиков в окне «Переходные процессы», в поле «Диапазон» (рис.3). Вызвать его можно следующим образом: клик ПКМ на графике «Переходные процессы»/пункт меню «Параметры…».
Характеристический полином (ХП) рассматриваемой системы будет иметь три корня, один из которых всегда принимает вещественное значение, а два других – комплексно сопряжённые: ![]() .
.
Корни ХП модели определяются по графику «Корневая плоскость» аналогичным способом.
Показатель колебательности следует определять по отношению мнимой части комплексного корня к его действительной составляющей следующим образом: ![]() .
.
К п.4. В результате исследования модели в таблицу 1 заносятся как прямые показатели качества переходного процесса модели САУ, так и значения корней её ХП. На основании полученных данных необходимо проследить связь между изменениями коэффициента передачи звена обратной связи (kП ) и основных показателей качества системы.
Варианты заданий
Таблица 2
№ п/п |
Коэффициенты ПФ ОУ 1 |
Коэффициенты ПФ ОУ 2 |
||||
C1 |
C2 |
C3 |
C4 |
C5 |
C6 |
|
0,001 |
0,012 |
1 |
0,690 |
0,438 |
1 |
|
1,960 |
0,763 |
1 |
2,150 |
0,678 |
1 |
|
0,710 |
0,408 |
1 |
0,880 |
0,472 |
1 |
|
2,130 |
0,673 |
1 |
3,260 |
0,950 |
1 |
|
0,100 |
0,131 |
1 |
0,090 |
0,169 |
1 |
|
0,050 |
0,102 |
1 |
0,010 |
0,045 |
1 |
|
0,160 |
0,182 |
1 |
0,060 |
0,120 |
1 |
|
0,990 |
0,514 |
1 |
1,230 |
0,557 |
1 |
|
1,390 |
0,741 |
1 |
0 |
0,219 |
0 |
|
0,123 |
0,070 |
1 |
0 |
0,810 |
0 |
|
0 |
0,755 |
0 |
1,500 |
0,986 |
1 |
|
0 |
0,698 |
0 |
2,200 |
0,863 |
1 |
|
0,200 |
0,181 |
1 |
0,439 |
0,917 |
0 |
|
1,200 |
0,643 |
1 |
0,467 |
0,674 |
0 |
|
0,178 |
0,219 |
0 |
0,009 |
0,104 |
1 |
|
0,281 |
0,810 |
0 |
0,040 |
0,070 |
1 |
|
0,243 |
0,986 |
1 |
0 |
0,755 |
0 |
|
0 |
0,863 |
0 |
0,052 |
0,698 |
1 |
|
0 |
0,917 |
1 |
0,093 |
0,181 |
0 |
|
0,093 |
0,435 |
0 |
0 |
0,643 |
1 |
|
0,080 |
0,674 |
1 |
0,130 |
0,722 |
0 |
|
0,052 |
0,479 |
1 |
0,063 |
0,516 |
0 |
|
0,025 |
0,350 |
0 |
0,003 |
0,126 |
1 |
|
0,003 |
0,119 |
0 |
0,120 |
0,705 |
1 |
|
0 |
0,045 |
1 |
0,002 |
0,286 |
1 |
|
0 |
0,520 |
1 |
0,001 |
0,111 |
1 |
|
10-5 |
0,057 |
1 |
0 |
0,894 |
1 |
|
7x10-4 |
0,104 |
1 |
0 |
0,029 |
1 |
|
10-4 |
0,070 |
1 |
1,2x10-3 |
0,216 |
1 |
|
5,7x10-4 |
0,104 |
1 |
2x10-5 |
0,029 |
1 |
|
1,22x10-4 |
0,070 |
1 |
0,007 |
0,216 |
1 |
|
0,100 |
0,755 |
1 |
0,003 |
0,207 |
1 |
|
.