2. ОСНОВНЫЕ СВЕДЕНИЯ
Объектом управления для дискретной системы программного
управления (ДСПУ) является многопозиционный электропривод.
Под этим термином по-нимается электропривод различных
производственных механизмов, рабочие органы которых
совершают ограниченные в пространстве, периодически
повторяющиеся и имеющие фиксированные для остановки перемещения.
Эти перемещения выполняются в определенной последовательности
в соответст-вии с технологической программой работы механизмов.
Примером таких ме-ханизмов могут служить многокоординатные
установки — металлорежущие станки, промышленные манипуляторы
и роботы, а также отдельные однокоординатные механизмы (лифты и др.).
В задачу ДСПУ, таким образом, входит управление началом и концом
перемещения, последовательностью отдельных перемещений и обеспечение
фиксированных остановок с временными паузами согласно технологической
программе работы. Перечисленные операции дискретны, поэтому
для построения данных систем управления используются аппараты
и элементы дискретного принципа действия. Таким образом,
ДСПУ по элементной базе представляют собой дискретную, а по
функциональному назначению про-граммную системы управления.
В зависимости от сложности технологической программы и
используе-мой базы ДСПУ можно подразделить на следующие типы:
1. системы управления с небольшим объемом переключений
на контактной релейной аппаратуре;
2. системы с большим объемом переключений на основе
логических элементов и унифицированных логических устройств;
3. системы управления с большим объемом переключений
и гибкой структурой на микропроцессорной основе
— универсальные программи-руемые контроллеры.
При составлении схемы ДСПУ, реализуемой на основе релейно-
контакторной аппаратуры, используется метод типовых узлов.
Рассмотрим некоторые из типовых узлов и схем управления,
которые можно использовать в данной лабораторной работе.
Узел схемы (рис. 1. а) обеспечивает включение контактора
КМ на-жатием на кнопку SB2 с запоминанием включенного
состояния с помощью шунтирующего кнопку замыкающего контакта
КМ. Отключение контактора КМ выполняется кнопкой SB1 или
путевым переключателем SQ1. Пунктиром на схеме показан
возможный вариант включения контактора замыкающим
контактом путевого переключения SQ2.
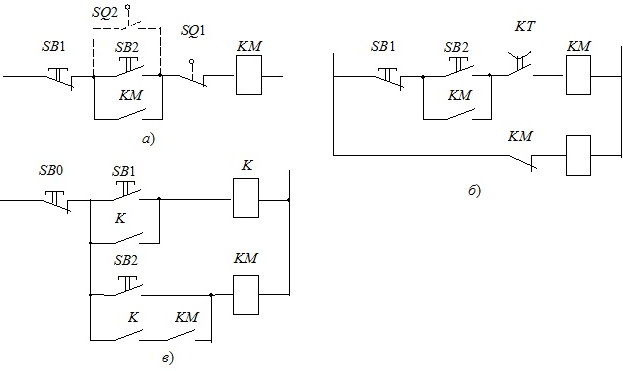 Рис. 1. Типовые узлы релейно-контактных схем
Схема узла включения контактора КМ на заданный интервал
времени показана на рис. 1, б. Включение контактора КМ
производится с помощью кнопки SB2 (реле времени КТ включается
при подаче напряжения на схему). Это приводит к отключению
размыкающим контактом КМ цепи питания катушки электромагнитного
реле времени КТ. Через выдержку времени реле КТ отключается и
размыкает свой замыкающий контакт в цепи катушки контактора КМ.
Внутри интервала выдержки времени контактор КМ может быть
отключен с помощью кнопки SB1.
На рис. 1, в приведена схема узла, предусматривающего два
режима работы двигателя — длительного (рабочего) и толкового
(наладочного). При отключенном реле К нажатие на кнопку SB2
обеспечивает толчковый режим — контактор КМ остается включенным
в течение времени нажатого состояния кнопки SB2, так как
шунтирующая кнопку цепь разомкнута. При включении реле К с помощью
кнопки SB1 его контакт в цепи самоблоки-ровки контактора KM будет
замкнут, поэтому при нажатии кнопки SB2 реализуется длительный
режим — контактор КМ остается включенным после отпускания кнопки SB2.
В дискретных системах программного управления широко применяется
принцип путевого управления, когда положение исполнительного
органа механизма контролируется путевыми переключателями.
На рис. 2 приведена схема двухпозиционного путевого управления
двигателем постоянного тока М, питаемым от сети постоянного тока.
При пуске двигателя М с помощью специальной схемы осуществляется
ограничение тока якоря на допустимом уровне. Для быстрой остановки
двигателя применяется динамическое торможение. Указанные схемы не
показаны на рис. 2.
При нажатии кнопки SB1 происходит включение контактора КМ1 и
по-становка его на самоблокировку за счет замыкающего контакта
КМ1, шунти-рующего кнопку SB1. Двигатель М подключается к сети
постоянного тока за счет замыкания силовых контактов КМ1.
После разгона двигатель М с постоянной скоростью перемещает
исполнительный орган механизма (или поворачивает его) до тех пор,
пока он достигнет крайнего положения, контролируемого путевым
переключателем SQ1. При нажатии упора на контактную систему SQ1
происходит переключение ее контактов. Размыкающий контакт отключает
контактор КМ1 от питания, что приводит к размыканию силовых
контактов КМ1 в цепи питания двигателя М.
Рис. 1. Типовые узлы релейно-контактных схем
Схема узла включения контактора КМ на заданный интервал
времени показана на рис. 1, б. Включение контактора КМ
производится с помощью кнопки SB2 (реле времени КТ включается
при подаче напряжения на схему). Это приводит к отключению
размыкающим контактом КМ цепи питания катушки электромагнитного
реле времени КТ. Через выдержку времени реле КТ отключается и
размыкает свой замыкающий контакт в цепи катушки контактора КМ.
Внутри интервала выдержки времени контактор КМ может быть
отключен с помощью кнопки SB1.
На рис. 1, в приведена схема узла, предусматривающего два
режима работы двигателя — длительного (рабочего) и толкового
(наладочного). При отключенном реле К нажатие на кнопку SB2
обеспечивает толчковый режим — контактор КМ остается включенным
в течение времени нажатого состояния кнопки SB2, так как
шунтирующая кнопку цепь разомкнута. При включении реле К с помощью
кнопки SB1 его контакт в цепи самоблоки-ровки контактора KM будет
замкнут, поэтому при нажатии кнопки SB2 реализуется длительный
режим — контактор КМ остается включенным после отпускания кнопки SB2.
В дискретных системах программного управления широко применяется
принцип путевого управления, когда положение исполнительного
органа механизма контролируется путевыми переключателями.
На рис. 2 приведена схема двухпозиционного путевого управления
двигателем постоянного тока М, питаемым от сети постоянного тока.
При пуске двигателя М с помощью специальной схемы осуществляется
ограничение тока якоря на допустимом уровне. Для быстрой остановки
двигателя применяется динамическое торможение. Указанные схемы не
показаны на рис. 2.
При нажатии кнопки SB1 происходит включение контактора КМ1 и
по-становка его на самоблокировку за счет замыкающего контакта
КМ1, шунти-рующего кнопку SB1. Двигатель М подключается к сети
постоянного тока за счет замыкания силовых контактов КМ1.
После разгона двигатель М с постоянной скоростью перемещает
исполнительный орган механизма (или поворачивает его) до тех пор,
пока он достигнет крайнего положения, контролируемого путевым
переключателем SQ1. При нажатии упора на контактную систему SQ1
происходит переключение ее контактов. Размыкающий контакт отключает
контактор КМ1 от питания, что приводит к размыканию силовых
контактов КМ1 в цепи питания двигателя М.
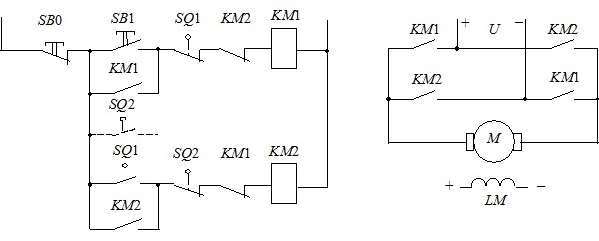 Рис. 2. Схема двухпозиционного путевого управления
Замыкающий контакт SQ1 после отключения контактора КМ1 через его
размыкающий контакт включает контактор КМ2, который с помощью
замыкающего контакта, шунтирующего SQ1, ставится на самоблокировку.
Замыкающие силовые контакты КМ2 подключают двигатель М к сети,
изменяя полярность напряжения на его якоре. Двигатель М реверсируется
и перемещает исполнительный орган механизма в противоположном
направлении. После достижения путевого переключателя SQ2 и воздействия
на его контактную систему упора происходит переключение контактов.
В результате размыкающий контакт SQ2 отключает катушку контактора
КМ2 от питания. При этом контактор КМ2 выключается и его силовые
контакты отключают двигатель М от сети. Двигатель М тормозится,
останавливая исполнительный орган механизма в положении SQ2.
Для получения непрерывного циклического движения между конеч-ными
переключателями SQ1 и SQ2 необходимо подключить замыкающий контакт SQ2
параллельно кнопке SB1, как показано на рис. 2 пунктиром. В этом случае
остановка движения осуществляется путем нажатия кнопки SB0.
Контакторы КМ1 и КМ2 имеют цепи взаимной электрической блокировки,
осуществляемой за счет включения размыкающего блок-контакта одного
контактора в цепь катушки другого контактора. Взаимная блокировка
исключает возможности одновременного включения контакторов КМ1 и КМ2,
приводящие к возникновению короткого замыкания в силовой цепи питания
двигателя.
На рис. 3 приведена принципиальная схема релейно-контакторного
управления двигателем М, в которой используются принципы путевого
управления и управления в функции времени. Для реализации схемы,
кроме путевых переключателей SQ1 и SQ2, используется реле времени
КТ часового типа с электромагнитным включением.
Схема управления работает следующим образом.
Рис. 2. Схема двухпозиционного путевого управления
Замыкающий контакт SQ1 после отключения контактора КМ1 через его
размыкающий контакт включает контактор КМ2, который с помощью
замыкающего контакта, шунтирующего SQ1, ставится на самоблокировку.
Замыкающие силовые контакты КМ2 подключают двигатель М к сети,
изменяя полярность напряжения на его якоре. Двигатель М реверсируется
и перемещает исполнительный орган механизма в противоположном
направлении. После достижения путевого переключателя SQ2 и воздействия
на его контактную систему упора происходит переключение контактов.
В результате размыкающий контакт SQ2 отключает катушку контактора
КМ2 от питания. При этом контактор КМ2 выключается и его силовые
контакты отключают двигатель М от сети. Двигатель М тормозится,
останавливая исполнительный орган механизма в положении SQ2.
Для получения непрерывного циклического движения между конеч-ными
переключателями SQ1 и SQ2 необходимо подключить замыкающий контакт SQ2
параллельно кнопке SB1, как показано на рис. 2 пунктиром. В этом случае
остановка движения осуществляется путем нажатия кнопки SB0.
Контакторы КМ1 и КМ2 имеют цепи взаимной электрической блокировки,
осуществляемой за счет включения размыкающего блок-контакта одного
контактора в цепь катушки другого контактора. Взаимная блокировка
исключает возможности одновременного включения контакторов КМ1 и КМ2,
приводящие к возникновению короткого замыкания в силовой цепи питания
двигателя.
На рис. 3 приведена принципиальная схема релейно-контакторного
управления двигателем М, в которой используются принципы путевого
управления и управления в функции времени. Для реализации схемы,
кроме путевых переключателей SQ1 и SQ2, используется реле времени
КТ часового типа с электромагнитным включением.
Схема управления работает следующим образом.
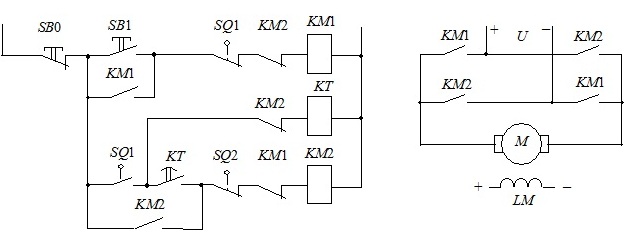 Рис. 3. Схема, содержащая элементы путевого и временного управления
В исходном состоянии схемы катушки контакторов КМ1 и КМ2, а также
реле времени КТ обесточены. При нажатии на кнопку SB1 подается питание
на катушку контактора КМ1. Контактор КМ1 включается и становится на
самоблокировку через замыкающий контакт, включенный параллельно кнопке
SB1.
Силовые замыкающие контакты КМ1 подключают якорь двигателя М к сети.
Двигатель М перемещает исполнительный орган механизма в направлении
положения путевого переключателя SQ1. После воздействия упора на
контактную
систему SQ1 происходит переключение контактов. Размыкающий контакт SQ1
отключает от питания катушку кон-тактора КМ1, в результате силовые
контакты
КМ1 отключают цепь якоря двигателя от сети. Двигатель М тормозится и
останавливается на время контролируемое реле времени КТ.
Действительно, замыкающий контакт SQ1 подключает катушку реле
времени КТ
через размыкающий контакт контактора КМ2 к напряжению пи-тания.
При этом
катушка контактора КМ2 питания не получает, так как в ее цепи включен
разомкнутый контакт КТ. После отсчета выдержки времени реле КТ его
замыкающий контакт в цепи питания контактора КМ2 замкнется,
что приведет
к включению контактора КМ2. Силовые контакты КМ2 подключат цепь якоря
двигателя М к сети, изменив полярность напряжения. Двигатель М будет
перемещать исполнительный орган в направлении SQ2 и достигнув его,
произведет переключение контактов. После этого размыкающий контакт SQ2
отключит катушку контактора КМ2 от питания.
После отключения контактами КМ2 якоря двигателя М от сети
исполнительный орган механизма остановится в положении
путевого переключателя SQ2.
В ДСПУ используются устройства, выполняющие счет различных операций
в циклах и дающие команды на соответствующие переключения в схеме
управления
или отключение электропривода после выполнения заданного числа операций.
На рис. 4 приведена схема счетного узла на реле напряжения. Схема
обеспечивает
счет ходов двухпозиционного механизма с помощью путевых выключателей
SQ1 и SQ2.
В исходном состоянии реле К1…К4 обесточены. После нажатия на
кнопку SB2
срабатывает реле К1, которое подготавливает цепь питания реле К2 для
включения.
Механизм перемещается в направлении к выключателю SQ2. замыкание его
контакта
включает реле К2, которое отключает реле К1 и подготавливает к
включению
реле К3.Механизм перемещается в направлении путевого переключателя SQ1.
Замыкание контакта SQ1 включает реле К3, которое отключает реле К2
и подготавливает к включению реле К4 и т.д. При использовании
светодиодов
VD1…VD4 информация о числе ходов механизма регистрируется их свечением.
Рис. 3. Схема, содержащая элементы путевого и временного управления
В исходном состоянии схемы катушки контакторов КМ1 и КМ2, а также
реле времени КТ обесточены. При нажатии на кнопку SB1 подается питание
на катушку контактора КМ1. Контактор КМ1 включается и становится на
самоблокировку через замыкающий контакт, включенный параллельно кнопке
SB1.
Силовые замыкающие контакты КМ1 подключают якорь двигателя М к сети.
Двигатель М перемещает исполнительный орган механизма в направлении
положения путевого переключателя SQ1. После воздействия упора на
контактную
систему SQ1 происходит переключение контактов. Размыкающий контакт SQ1
отключает от питания катушку кон-тактора КМ1, в результате силовые
контакты
КМ1 отключают цепь якоря двигателя от сети. Двигатель М тормозится и
останавливается на время контролируемое реле времени КТ.
Действительно, замыкающий контакт SQ1 подключает катушку реле
времени КТ
через размыкающий контакт контактора КМ2 к напряжению пи-тания.
При этом
катушка контактора КМ2 питания не получает, так как в ее цепи включен
разомкнутый контакт КТ. После отсчета выдержки времени реле КТ его
замыкающий контакт в цепи питания контактора КМ2 замкнется,
что приведет
к включению контактора КМ2. Силовые контакты КМ2 подключат цепь якоря
двигателя М к сети, изменив полярность напряжения. Двигатель М будет
перемещать исполнительный орган в направлении SQ2 и достигнув его,
произведет переключение контактов. После этого размыкающий контакт SQ2
отключит катушку контактора КМ2 от питания.
После отключения контактами КМ2 якоря двигателя М от сети
исполнительный орган механизма остановится в положении
путевого переключателя SQ2.
В ДСПУ используются устройства, выполняющие счет различных операций
в циклах и дающие команды на соответствующие переключения в схеме
управления
или отключение электропривода после выполнения заданного числа операций.
На рис. 4 приведена схема счетного узла на реле напряжения. Схема
обеспечивает
счет ходов двухпозиционного механизма с помощью путевых выключателей
SQ1 и SQ2.
В исходном состоянии реле К1…К4 обесточены. После нажатия на
кнопку SB2
срабатывает реле К1, которое подготавливает цепь питания реле К2 для
включения.
Механизм перемещается в направлении к выключателю SQ2. замыкание его
контакта
включает реле К2, которое отключает реле К1 и подготавливает к
включению
реле К3.Механизм перемещается в направлении путевого переключателя SQ1.
Замыкание контакта SQ1 включает реле К3, которое отключает реле К2
и подготавливает к включению реле К4 и т.д. При использовании
светодиодов
VD1…VD4 информация о числе ходов механизма регистрируется их свечением.
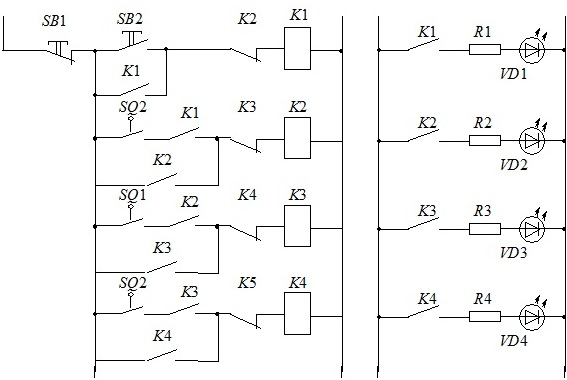 Рис. 4. Схема счетного узла на реле
После окончания счета, на который рассчитана схема,
включается по-следнее реле, которое дает необходимую
команду в систему программного управления.
Нажатие на кнопку SB1 приводит схему счетного узла в исходное состояние.
Рис. 4. Схема счетного узла на реле
После окончания счета, на который рассчитана схема,
включается по-следнее реле, которое дает необходимую
команду в систему программного управления.
Нажатие на кнопку SB1 приводит схему счетного узла в исходное состояние.
|
|