|
|
|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ДОНСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ЦЕНТР ДИСТАНЦИОННОГО ОБУЧЕНИЯ Кафедра «Сервис и техническая эксплуатация автотранспортных средств»
Конструкция, расчет и потребительские свойства автомобилей
ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА АВТОМОБИЛЯ ТЕОРИЯ И РАСЧЕТ
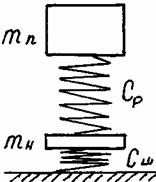
Учебное пособие 4.2. Схема колебательной системы автомобиля При исследовании колебаний все массы, составляющие автомобиль, делятся на две группы: массы подрессоренные и
неподрессоренные. Подрессоренными считаются массы, вес которых передается на упругие элементы подвески. У автомобилей подрессоренными массами являются
кузов и рама с укрепленными на ней механизмами; колеса в сборе с осями (мостами) относятся к неподрессоренным массам.
Рис.25.Схема колебательной системы подвески автомобиля с неподресоренными массами При составлении уравнения колебательного движения подрессоренной массы в этом случае получающиеся выражения оказываются неудобными для пользования, а с допустимой для практики точностью можно учитывать неподрессоренные массы. Это объясняется тем, что величина неподрессоренных масс по сравнению с подрессоренной обычно очень мала, жесткость шин также значительно выше жесткости подвески (табл. 3). Таблица 3 Суммарные жесткости подвески и шин
Таким образом, схема для исследования свободных колебаний автомобиля может быть принята в упрощенном виде, без учета
неподрессоренных масс mн.
где fр и fш - прогибы рессор и шин под действием груза G. Тогда приведенная жесткость подвески и шин будет равна:
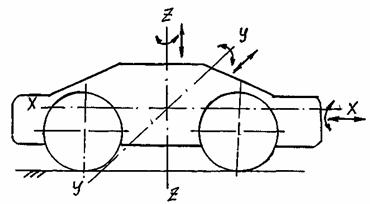
Подресоренная часть автомобиля, как всякое свободное тело в пространстве обладает шестью степенями свободы и может иметь следующие колебательные движения (рис. 26):
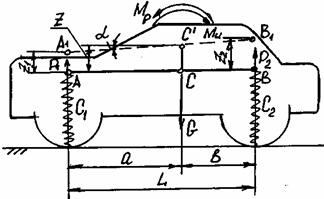
Рис.26. Схема колебательной системы автомобиля вдоль оси y-y........................пошатывание вдоль оси y-y........................виляние(рыскание) Ввиду сложности исследования системы со многими степенями свободы обычно при элементарном анализе плавности хода автомобиля рассматривают только два вида колебаний подрессоренных масс: вертикальные линейные (вдоль оси Z-Z) и угловые продольные (относительно оси y-y). В соответствии с этим в дальнейшем будем рассматривать колебания автомобиля как тела, имеющего две степени свободы. Кроме того, для упрощения выводов не будем учитывать влияние неподрессоренных масс, амортизаторов и эластичности подушек сидений. Расчетная колебательная система примет вид, показанный на рис. 27. Рассмотрение схемы показывает, что колебания автомобиля можно представить в виде колебаний отрезка АВ, проходящего через центр тяжести С автомобиля, причем точки А и В отрезка расположены над опорами передних и задних колес.
Рис.27. Расчетная схема колебательной системы автомобиля Рассмотрим некоторое промежуточное положение отрезка АВ. Пусть отрезок из своего нейтрального положения в результате
колебаний переместился в положение А1В1. Снизу вверх на отрезок действуют реакции эластичных элементов равные: где G1 и G2 - части веса подрессоренной массы, приходящиеся на переднюю и заднюю подвески; В центре масс отрезка АВ действуют силы вниз:
и вес подрессоренных масс G. Уравнение колебательного движения будет
Это выражение является дифференциальным уравнением вертикальных колебаний автомобиля. Mp=P2b-P1a Инерционный момент Ми, сопротивляющийся этому повороту отрезка АВ (кузова автомобиля), равен:
где ρ- радиус инерции подрессоренной массы автомобиля относительно оси, проходящей через центр масс перпендикулярно плоскости симметрии.
Для анализа колебательных движений автомобиля важным является изучение параметров движения точек А и В. Пользуясь схемой на рис.27, определяем величины перемещений Z1 и Z2 этих точек: Z1=Z-atgα≈Z-aα,
Для более удобного исследования уравнений (34) величина d2Z/dt2 и d2α/dt2 заменяют параметрами, характеризующими автомобиль. Определяя эти величины из уравнений (31) и (32) и подставляя в выражения (34) получим:
Определяя из второго уравнения величину Z2 и подставляя ее выражение в первое уравнение, получим:
И наоборот, из первого уравнения определяя величину Z1 и подставляя ее выражение во второе уравнение, получим:
По аналогии с уравнением (32) колебательного движения коэффициенты перед перемещениями Z1 и t2 представляют собой квадраты угловых частот колебаний точек А и В автомобиля, Эти угловые частоты ω1 и ω2 называются парциальными и соответственно равны:
Тогда
Из полученных уравнений следует, что вертикальные колебания точек А и В автомобиля (см. схему на рис. 27) зависят друг от друга. При возбуждении колебаний одной
из точек возникают колебания другой точки.Очевидно, что если колебания одной точки не будут отражаться на колебаниях другой, то колебания автомобиля будут
меньше. ab-ρ2=0; ab=ρ2 Уравнения колебаний (39) и (40) в этом случае принимают вид:
Частоты колебаний соответственно равны:
Схема колебательной системы автомобиля при условии, когда ав=ρ2представлена, на рис. 28.
Рис.28. Схема колебательной системы автомобиля при ab=ρ2
На рис. 28.а показано колебание передней части автомобиля с частотой ω1 при неподвижной задней опоре. На рис.28,б показано колебание задней
части автомобиля с частотой ω2 при неподвижной передней опоре.
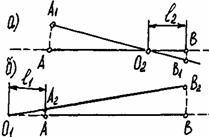
Точка А, лежащая над передней осью автомобиля, в некоторый момент времени заняла положение А1. В тот же момент времени точка В заняла положение
В1. Соединяя точки А1 и В1, получим линию, точка О2 пересечения которой с первоначальным положением отрезка АВ дает положение
заднего центра колебаний. Любые положения точек А1 и В1 кузова в процессе колебаний, взятые в один момент времени, определят тот же центр
колебаний О2. | |||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||