|
|
|
| |||||
|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ДОНСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ЦЕНТР ДИСТАНЦИОННОГО ОБУЧЕНИЯ Кафедра «Сервис и техническая эксплуатация автотранспортных средств»
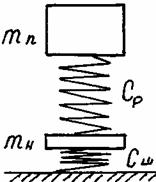
Конструкция, расчет и потребительские свойства автомобилей РАСЧЕТ МЕХАНИЗМОВ, СИСТЕМ И ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ АВТОМОБИЛЯ Учебное пособие 11. РАСЧЕТ ПЛАВНОСТИ ХОДА АВТОМОБИЛЯ 11.2. Схема колебательной системы автомобиля При исследовании колебаний все массы, составляющие автомобиль, делятся на две группы: массы подрессоренные и
неподрессоренные. Подрессоренными считаются массы, вес которых передается на упругие элементы подвески. У автомобилей подрессоренными массами являются кузов и рама с
укрепленными на ней механизмами; колеса в сборе с осями (мостами) относятся к неподрессоренным массам.
Рис.29.Схема колебательной системы подвески автомобиля с неподресоренными массами Схема для исследования свободных колебаний автомобиля может быть принята в упрощенном виде, без учета
неподрессоренных масс mн.
где fр и fш - прогибы рессор и шин под действием груза G.
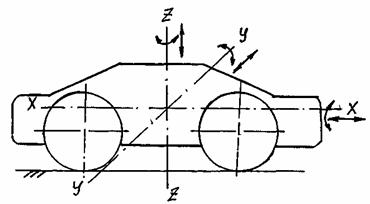
Подресоренная часть автомобиля, как всякое свободное тело в пространстве, обладает шестью степенями свободы и
может иметь следующие колебательные движения (рис.30): угловые:
относительно оси y–y ……………… галопирование;
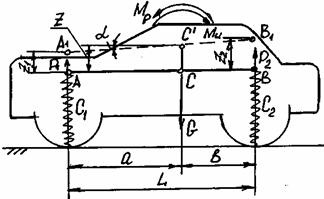
Рис.30. Схема колебательной системы автомобиля Ввиду сложности исследования системы со многими степенями свободы обычно при элементарном анализе плавности хода автомобиля рассматривают только два вида колебаний подрессоренных масс: вертикальные линейные (вдоль оси Z-Z) и угловые продольные (относительно оси Y-Y). В соответствии с этим в дальнейшем будем рассматривать ко-лебания автомобиля как тела, имеющего две степени свободы. Кроме того, для упрощения выводов не будем учитывать влияние неподрессоренных масс, амортизаторов и эластичности подушек сидений. Расчетная колебательная система примет вид, показанный на рис.31. Рассмотрение схемы показывает, что колебания автомобиля можно представить в виде колебаний отрезка АВ, проходящего через центр тяжести С автомобиля, причем точки А и В отрезка расположены над опорами передних и задних колес.
Рис.31. Расчетная схема колебательной системы автомобиля Рассмотрим некоторое промежуточное положение отрезка АВ. Пусть отрезок из своего нейтрального положения в
результате колебаний переместился в положение А1В1.
и вес подрессоренных масс G.
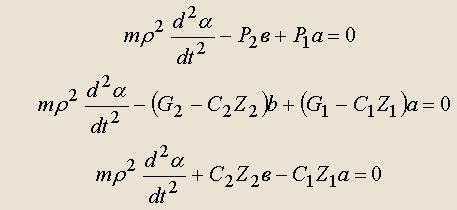
Это выражение является дифференциальным уравнением вертикальных колебаний автомобиля. Mp=P2b-P1a Инерционный момент Ми, сопротивляющийся этому повороту отрезка АВ (кузова автомобиля), равен:
где ρ - радиус инерции подрессоренной массы автомобиля относительно оси, проходящей через центр масс перпендикулярно плоскости симметрии.
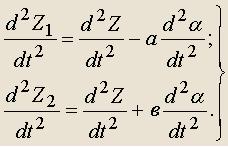
Для анализа колебательных движений автомобиля важным является изучение параметров движения точек А и В. Пользуясь схемой на рис. 31, определяем величины перемещений Z1 и Z2 этих точек: Z1=Z-a·tgα≈Z-a·α, Z2=Z+b·tgα≈Z+b·α Продифференцировав эти уравнения дважды, получим:
Для более удобного исследования этих уравнений величины d²Z/dt² и d²α/dt² заменяют параметрами, характеризующими автомобиль.
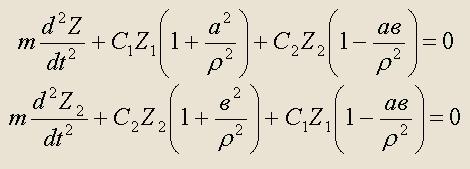
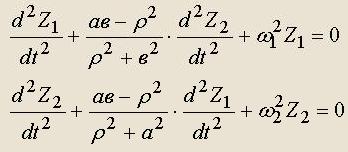
Определив из второго уравнения величину Z2 и подставив ее выражение в первое уравнение, получим
И наоборот, из первого уравнения, определив величину Z1 и подставив ее выражение во второе уравнение, получим
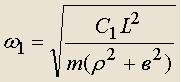
По аналогии с уравнением колебательного движения коэффициенты перед перемещениями Z1 и Z2 представляют собой квадраты угловых частот колебаний точек А и В автомобиля. Эти угловые частоты ω1 и ω2 называются парциальными.
Тогда:
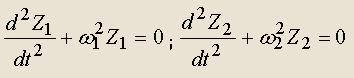
Из полученных уравнений следует, что вертикальные колебания точек А и В автомобиля (см. схему на рис.31)
зависят друг от друга. При возбуждении колебаний одной из точек возникают колебания другой точки. ab-ρ²=0; ab=ρ² Уравнения колебаний в этом случае принимают вид:
Частоты колебаний соответственно равны:
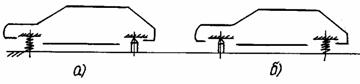
Схема колебательной системы автомобиля при условии, когда ав=ρ², представлена на рис.32.
Рис.32. Схема колебательной системы автомобиля при ab=ρ²: а – z2=0 (колебание передней части автомобиля с частотой ω1 при неподвижной задней опоре); б – z1=0 (колебание задней части автомобиля с частотой ω2 при неподвижной передней опоре) При ав=ρ² колебания передней и задней частей автомобиля независимы и происходят относительно точек опоры соответственно задних и
передних колес, а при ав≠ρ² колебания передней части кузова зависят от колебаний задней части кузова, и каждое из колебаний происходит вокруг какого-то своего
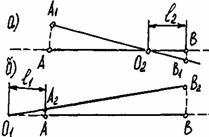
центра колебаний. Эти центры можно определить, анализируя колебания кузова при возбуждении их в передней или задней части автомобиля.
Рис.33. Схемы колебательной системы автомобиля при aв≠ρ² Точка А, лежащая над передней осью автомобиля, в некоторый момент времени заняла положение А1. В тот
же момент времени точка В заняла положение В1. | |||||