4. Робот
4.1. Назначение робота
Шестиосный робот (манипулятор) KUKA IR 161/15 предназначен для выполнения
операций промышленного производства. Основные области применения робота:
манипулирование и транспортировка, точечная и дуговая сварка.
Робот обеспечивает рабочему инструменту движение с постоянной скоростью по
прямолинейной и круговой траектории в любых пространственных положениях. Шестая ось
робота оснащёна специальным устройством, обеспечивающим поперечные колебания
рабочего инструмента. Оси манипулятора и направление их вращения показаны на рис. 1.

Рис. 1. Оси манипулятора и направление их вращения.
Технические данные робота
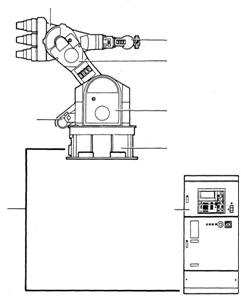
- Число осей – 6 (рис.2).
- Диапазон движения осей: 1-320?, 2-129?, 3-270?, 4-500?, 5-240?, 6-540?.
Основными осями робота являются оси 1-3, осями кисти 4-6.
- Грузоподъемность (номинальная) – 15 кг.
>
- Повторная точность - ±0,2 мм.
- Приводная система – электромеханическая с серводвигателями постоянного тока транзисторного управления.
- Рабочий диапазон обслуживания:
- без удлинителя руки радиусом – 1,55 м,
- с удлинителем 400 мм радиусом – 1,95 м.
- Номинальная мощность – 5,9 кВА (при ПВ=40%).
- Масса – 600 кг.
Охлаждение:
для системы управления – один теплообменник, два вентилятора;
2 - для силовой части – два теплообменника, четыре вентилятора.
Рис. 2. Основные узлы робота