

Задача 2 Согласно варианту, построить регуляторную и перегрузочную (корректорную) ветви регуляторной характеристики дизельного двигателя с всережимным регулятором. Выбрать взаимосвязанные значения крутящего момента Мкр, мощности N и частоты вращения n. Рассчитать коэффициенты приспособляемости двигателя по крутящему моменту kM, обосновать направление их изменения с целью улучшения их эксплуатационных показателей двигателя и трактора в целом. Определить из условия безостановочной устойчивой работы двигателя наибольшее допустимое значение момента сил сопротивления Му и соответствующую ему частоту вращения nу. Выбрать оптимальное значение коэффициента загрузки М, коэффициента загрузки двигателя по крутящему моменту εM opt и сравнить его с εN opt. Используя номинальный закон распределения момента сил сопротивления на валу двигателя, определить наименьшее Мc min и наибольшее Мc max значения. Сделать вывод о необходимости переключения передач трактора в процессе работы. Эксплуатационные свойства изучаемых двигателей внутреннего сгорания определяются эффективной мощностью, крутящим моментом, угловой скоростью или частотой вращения, а также между собой соотношениями:
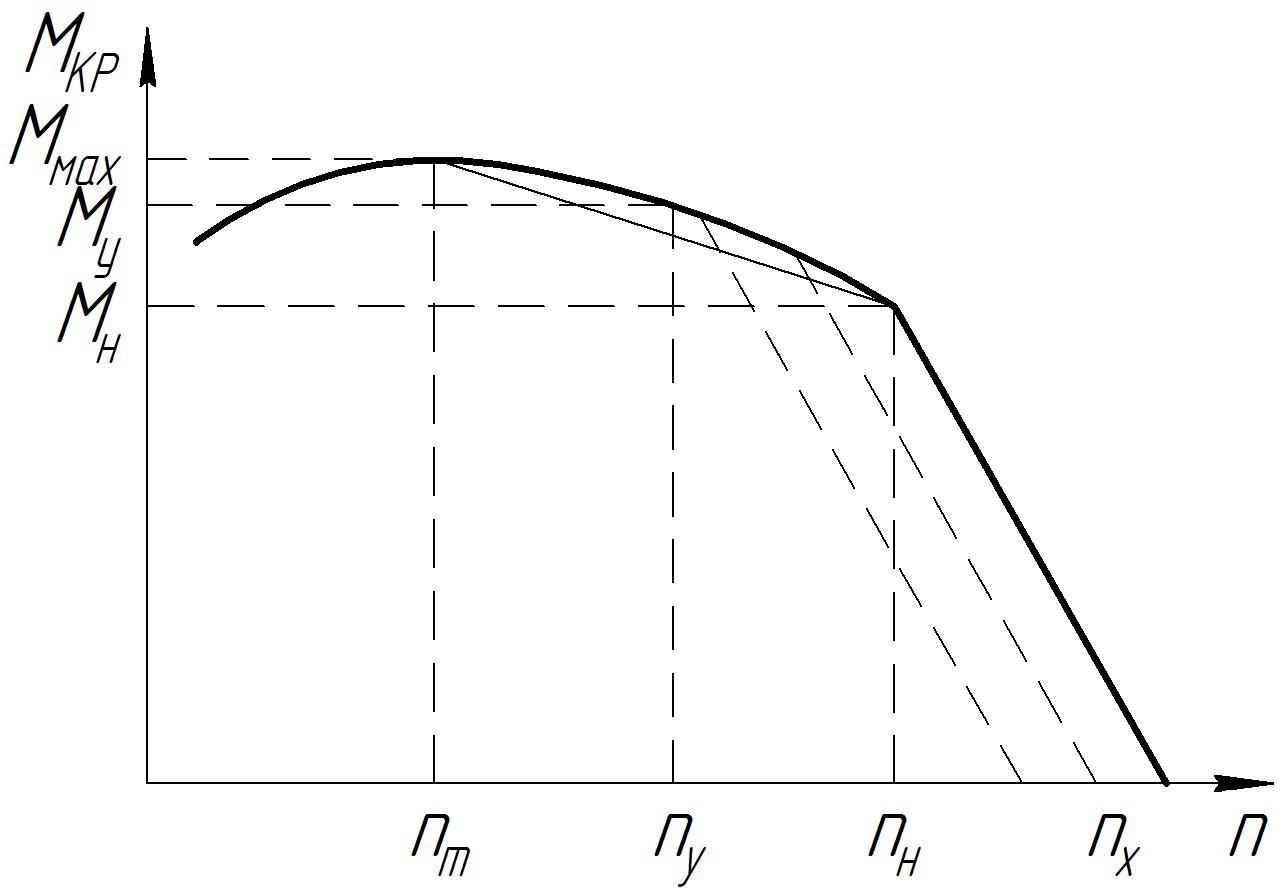
где N – эффективная мощность двигателя, кВт; Мкр – крутящий момент на валу двигателя, кН·м; ω – угловая скорость, рад/с; n – частота вращения вала двигателя, мин-1; GT - часовой расход топлива, кг\ч; g0- удельный расход топлива, г/(кВт·ч). Взаимосвязанные значения N, Мкр, n, GT, g0 изобразить графически на регуляторной характеристике, которую для эксплуатационных расчетов строят в функции от М или n. В пределах данного задания из регуляторной характеристики достаточно использовать только график зависимости от крутящего момента М и частоты вращения n (рис. 2.1).
Рисунок 2.1 Регуляторная характеристика дизеля с всережимным регулятором. На рисунке 2.1 отрезок ab соответствует регуляторной ветви, отрезок bc - перегрузочной (корректорной) ветви, которым приближенно заменена фактическая кривая перегрузочной ветви. Основным режимам работы двигателя на графике соответствуют точки: а – режим холостого хода при полной подаче топлива, крутящем моменте Мкр=0, мощности N=0 и частоте вращения nx; b – режим номинальной (паспортной) загрузки при крутящем моменте Мн, номинальной мощности Nн и частоте вращения nн; с – режим максимальной перегрузки при наибольшем крутящем моменте Мmax, соответствующей мощности Nm и частоте вращения nm. Значения nx, nн,nm, Mн, Mmax, Nн следует выбрать из таблицы 2.1. Таблица 2.1. Основные параметры двигателей тракторов Номинальную мощность Nн определяют при стендовых испытаниях двигателя без вентилятора, воздухоочистителя и другого вспомогательного оборудования, а эксплуатационную Nэ – с полным комплектом оборудования, включая вентилятор, воздухоочиститель и др. поскольку значения мощностей Nэ и Nн близки между собой, то в последующих расчетах следует использовать номинальную мощность Nн, принимая Nн= Nэ. Значение мощности Nm, соответствующей режиму максимальной перегрузки двигателя, можно рассчитать по формуле:
Значения крутящего момента Mmax и частоты вращения nm при угловой скорости ωm следует выбирать из таблицы 2.1. Коэффициенты приспособляемости по крутящему моменту (коэффициент запаса крутящего момента) km и по частоте вращения kn в соответствии с теорией трактора рассчитывается по формулам:
Указанные коэффициенты характеризуют способность двигателя преодолевать временные перегрузки при неизбежных колебаниях сил сопротивления, действующих как на трактор, так и на рабочие машины. Чем больше значения km и kn, тем дольше двигатель выдерживает временные нагрузки без переключения передач трактора, а соответственно повышается производительность, сокращается расход топлива, снижается утомляемость тракториста, уменьшается износ механизмов управления трактором. Такими преимуществами при прочных равных условиях обладает двигатель постоянной мощности Д-440 трактора ДТ-75Т, у которого коэффициент km =1,355. На основании опытных данных установлено, что устойчивая работа тракторного двигателя при малой вероятности заглохания из-за перегрузки обеспечивается при соблюдении условия
где Му – наибольшее допустимое значение момента сил сопротивления на валу двигателя, кН·м Многие современные тракторы оборудованы тахоспидо-метрами, позволяющими оценивать загрузку двигателя по частоте вращения. В связи с этим необходимо определить частоту вращения вала двигателя ny, соответствующую режиму допустимой перегрузки при
Для этого следует получить аналитическую зависимость вращающего момента двигателя от частоты вращения. На прямолинейных участках ab и bc регуляторной характеристики (см. рис. 2.1) такие зависимости имеют вид:
В формуле (2.5) принимаем
Сравнивая значение ny с показаниями тахоспидометра в процессе работы, можно подбирать такие передачи трактора, при которых фактическая частота вращения вала двигателя ni будет удовлетворять условию устойчивости работы без заглохания: Коэффициент загрузки двигателя по мощности определяют из равенства:
где Под оптимальным, или наилучшим, в пределах данного задания следует подразумевать такое значение коэффициента загрузки двигателя
Сопоставляя значение Оптимальный коэффициент загрузки двигателя по крутящему моменту получают с учетом формулы (2.1) из равенства
где На регуляторной ветви ab (см. рис. 1.1.)
где Значение
Коэффициент вариации и среднеквадратичное отклонение момента сил сопротивления связаны соотношениями:
С учетом этих соотношений получают наибольшее и наименьшее значения момента сил сопротивления на валу двигателя:
Если При невозможности полной загрузки двигателя на конкретной работе из-за ограничения числа машин и рабочей скорости рекомендуют для экономии топлива переходить на частичный режим работы двигателя за счет уменьшения подачи топлива и одновременного включения более высокой скорости. Частичные регуляторные характеристики двигателя при сниженной подаче топлива показаны на рис. 2.1 штриховыми линиями, которые параллельны основной регуляторной ветви ab. Корректорная ветвь при этом одна и та же и соответственно более короткая. В связи с этим работа двигателя на частичном режиме характеризуется меньшей перегрузочной способностью, что ограничивает возможности широкого использования данного метода. |


 (2.1.)
(2.1.) (2.2.)
(2.2.) (2.3.)
(2.3.)
 .Тогда соответствующая этому режиму частота вращения вала двигателя
.Тогда соответствующая этому режиму частота вращения вала двигателя (2.6.)
(2.6.) .Поэтому для обеспечения устойчивой работы двигателя более эффективно автоматическое переключение передач.
.Поэтому для обеспечения устойчивой работы двигателя более эффективно автоматическое переключение передач.  (2.7)
(2.7) - мощность двигателя при i-ой загрузке, кВт.
- мощность двигателя при i-ой загрузке, кВт. , при котором удельный расход топлива ge минимален. Значение gemin зависит от конструктивных особенностей самого двигателя и закономерностей изменения действующих сил сопротивления. Чем больше неравномерность этих сил, тем меньше должен быть коэффициент загрузки двигателя
, при котором удельный расход топлива ge минимален. Значение gemin зависит от конструктивных особенностей самого двигателя и закономерностей изменения действующих сил сопротивления. Чем больше неравномерность этих сил, тем меньше должен быть коэффициент загрузки двигателя  , так как требуется большой запас мощности для преодоления временных перегрузок. Неравномерность сил сопротивления характеризуется коэффициентом вариации момента этих сил на валу двигателя
, так как требуется большой запас мощности для преодоления временных перегрузок. Неравномерность сил сопротивления характеризуется коэффициентом вариации момента этих сил на валу двигателя  . При этом каждому значению
. При этом каждому значению  соответствует такой максимальный коэффициент загрузки двигателя
соответствует такой максимальный коэффициент загрузки двигателя  , при котором имеет место минимальный удельный расход топлива gemin. Однако аналитические методы определения gemin в функции
, при котором имеет место минимальный удельный расход топлива gemin. Однако аналитические методы определения gemin в функции  , чтобы по показаниям тахоспидометра выбрать оптимальный режим работы. Поскольку
, чтобы по показаниям тахоспидометра выбрать оптимальный режим работы. Поскольку 

 - оптимальный крутящий момент, кН·м.
- оптимальный крутящий момент, кН·м. , чему соответствует
, чему соответствует  . Соотношение
. Соотношение  имеет место только при
имеет место только при  . При нормальной загрузке двигателя значения
. При нормальной загрузке двигателя значения  близки между собой, поэтому приближенно можно принять
близки между собой, поэтому приближенно можно принять  .
Используя нормальный закон распределения, находим наименьшее
.
Используя нормальный закон распределения, находим наименьшее  и наибольшее
и наибольшее  значения момента сил сопротивления на валу двигателя:
значения момента сил сопротивления на валу двигателя:
 - математическое ожидание момента сил сопротивления, кН·м;
- математическое ожидание момента сил сопротивления, кН·м;  - среднее квадратическое отклонение момента, кН·м.
- среднее квадратическое отклонение момента, кН·м. с учетом формулы (2.10) примет вид:
с учетом формулы (2.10) примет вид:


 , то в процессе работы не требуется переключать передачи трактора из-за перегрузки двигателя, и наоборот. Значение
, то в процессе работы не требуется переключать передачи трактора из-за перегрузки двигателя, и наоборот. Значение  свидетельствует о том, что оптимальный коэффициент загрузки
свидетельствует о том, что оптимальный коэффициент загрузки  не гарантирует полного исключения чрезмерных кратковременных перегрузок двигателя – вероятность их будет весьма мала.
не гарантирует полного исключения чрезмерных кратковременных перегрузок двигателя – вероятность их будет весьма мала.