

Задача 18
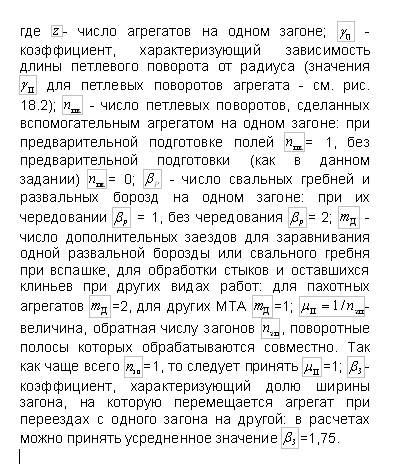
После комплектования агрегатов дальнейшее улучшение показателей ресурсосбережения достигается за счет обоснования эффективных способов движения МТА, обеспечивающих наименьшие потери ресурсов на холостые ходы. Таблица 18.1. Исходные данные для расчёта Принятые обозначения:L - длина гона; В - ширина захвата агрегата; Vx — скорость движения при холостом ходе МТА; z - число агрегатов при групповой работе; H — навесной агрегат; ПН - полунавесной агрегат; П — прицепной агрегат; ПО — обработка поворотных полос не требуется. В задании составы ресурсосберегающих агрегатов с целью экономии времени заданы в зависимости от длины гона L. Для пахотных агрегатов на базе мощных тракторов типа Т-150 и К-701 предусмотрена также групповая работа в составе пахотных звеньев, число z которых следует учитывать в расчетах. При выборе способа движения и видов поворотов МТА в соответствии с рисунками 18.1 и 18.2 должны быть соблюдены следующие основные требования: высокое качество выполняемой операции; безопасности труда и охраны окружающей среды; наименьшая длина холостого пути при минимальных потерях времени смены и используемых ресурсов.
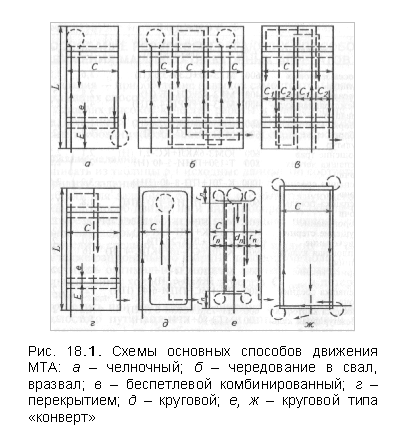
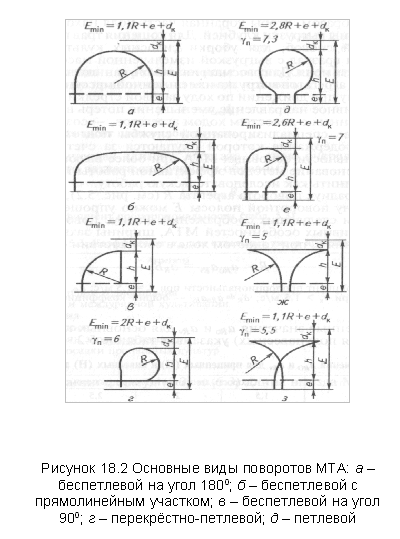
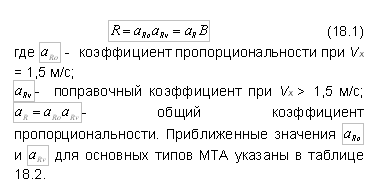
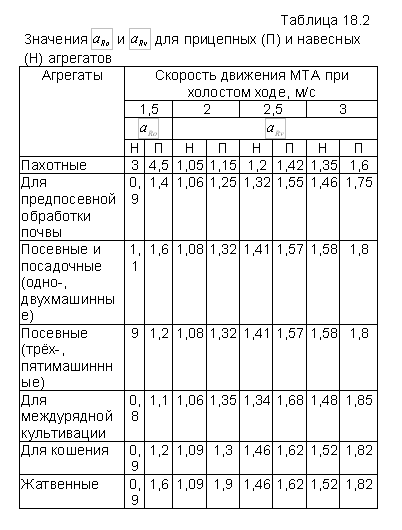
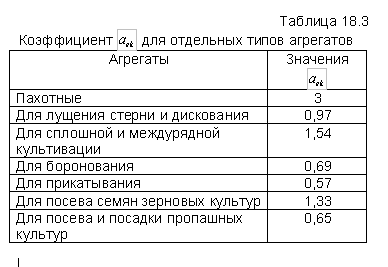
Проанализировать выбранную схему выбранного способа движения. Например, для вспашки обычными плугами применимы способы движения всвал и вразвал как раздельно, так и с чередованием, а также беспетлевой комбинированный и круговой типа «конверт» (рис. 18.1). Преимущество чередования способов всвал и вразвал заключается в почти двукратном уменьшении числа свальных гребней и развальных борозд. При беспетлевом комбинированном способе движения пахотных агрегатов сложнее разбивка поля на загоны, но меньше ширина поворотной полосы из-за отсутствия петлевых поворотов. При способе движения «конверт» меньше холостой путь агрегата, но больше потери времени смены, связанные с разбивкой поля на загоны. Этот способ сложнее для практического применения. Недостатки, связанные с разбивкой поля на загоны, не характерны для оборотных фронтальных плугов при движении челночным способом. Однако этих плугов мало в хозяйствах, поэтому в задании они не рассмотрены. Операции лущения стерни, дискования, боронования, прикатывания можно выполнять следующими способами: челночным: круговым; вразвал; перекрытием. Круговой способ движения более предпочтителен при небольшой ширине захвата агрегата и малых размерах полей со сложной конфигурацией. Способы движения вразвал и перекрытием для этих же операций эффективны при большой ширине захвата МТА, когда на выполнение петлевых поворотов требуется много времени. Посевные и посадочные операции при наличии в агрегате до двух машин целесообразно выполнять челночным способом. Узкорядный посев семян зерновых культур агрегатом с более чем двумя сеялками предпочтительнее выполнять способами движения вразвал или перекрытием. Для сплошной и междурядной культивации более эффективны способы движения челночный (до двух машин в агрегате) и перекрытием (более двух машин в агрегате). При уборке картофеля часто используют беспетлевой комбинированный способ движения агрегатов на четырех равных частях загона таким образом, чтобы убранная часть поля находилась справа — со стороны выгрузки клубней. Для кошения трав предпочтителен круговой способ, для уборки силосных культур - также круговой или вразвал с выгрузкой измельченной массы в сторону убранной части поля. Для рассматриваемых в данном задании силосоуборочных агрегатов выгрузка измельченной массы происходит в левую сторону при движении по ходу часовой стрелки. Перспективное направление уменьшения потерь времени и ресурсов, связанных с холостым ходом агрегатов, - создание в каждом хозяйстве специализированной службы подготовки полей, затраты на содержание которой окупаются за счет повышения производительности основных МТА при более высоком качестве работы. Обоснование методов эффективной работы такой службы можно выполнить как исследовательскую работу. Средний радиус поворота агрегата R (см. рис. 18.2), длину выезда е и ширину поворотной полосы Е можно упрощенно определить с учетом следующих соображений. Радиус поворота зависит от конструктивных особенностей МТА, ширины захвата В и скорости движения Vx при холостом ходе в соответствии с равенством:
Фактическая ширина поворотной полосы E должна быть не менее допустимого минимального значения Emin из условия совершения агрегатом безопасного поворота. Кроме того, значение E должно быть кратно одной B или удвоенной 2B ширине захвата в зависимости от типа МТА и условий его работы. Минимальная ширина поворотной полосы (см. рис. 18.2)
Если поворотную полосу необходимо обработать за четное число проходов МТА, то значение Оптимальную ширину загона следует определить по двум основным критериям ресурсосбережения:
Для всех МТА и способов движения, изображенных на рисунке 18.1, длину холостого пути агрегата, м, определяют из обобщенного равенства
Если каждый агрегат работает на отдельном загоне, то в соответствующих равенствах следует принять z=1. Такой вариант групповой работы агрегатов наиболее эффективен. Величина
Такой вариант расчета более полно отражает производственную ситуацию, поскольку в большинстве случаев тракторист сам вынужден заниматься разбивкой поля на загоны. Исходя из этого практические рекомендации целесообразно разрабатывать на основании формулы (18.14).
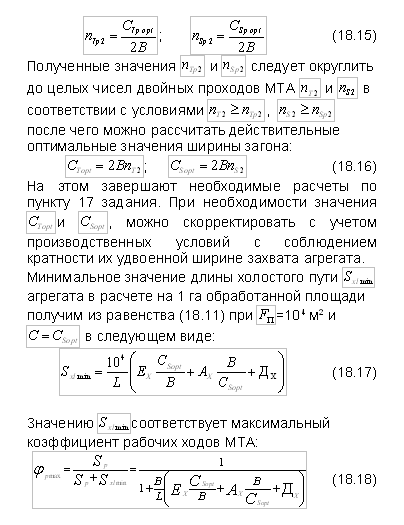
Действительная оптимальная ширина загона должна быть кратна удвоенной ширине захвата, поэтому предварительно на основании формул (18.13) и (18.14) следует определить расчетное число двойных проходов МТА:
Аналогичным образом из (18.12) при
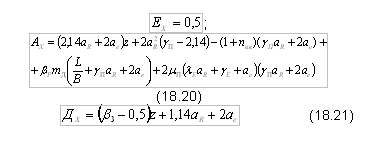
Значения Ex, Ax, Дx для каждого способа движения следует определять по приведенным ниже формулам. Для способов движения всвал и вразвал, включая их чередование:
При чередовании способов движения МТА всвал и вразвал на вспашке для уменьшения длины пути или времени холостых переездов следует обрабатывать нечетные загоны способом всвал в направлении слева направо, а четные загоны — способом вразвал в обратном направлении. Кроме того, возможны и другие частные случаи работы агрегатов: z=1 - каждый агрегат группы работает на отдельном загоне; mд=0 — при отсутствии дополнительных заездов для заравнивания борозд, гребней, стыков и клиньев; Значения mд= 0 и Для движения беспетлевым комбинированным способом:
При необходимости дополнительных заездов для обработки борозд и гребней (например, при вспашке), а также стыков следует принять βp= 2. Значение mд выбирают по аналогии с предыдущими способами движения. Случаи mд= 0 и
Приведенные условия обеспечения возможности совершения агрегатом беспетлевых поворотов должны соблюдаться при любом варианте расчета. Если определяемая по формуле (18.13) или (18.24) ширина загона C с учетом выражений (18.22) и (18.23) окажется слишком мала и неудобна из практических соображений, то следует выбрать ближайшее рациональное значение ширины загона Cp, кратное удвоенной 2В ширине захвата агрегата. При этом число проходов МТА на каждой части загона должно быть целым. Направление движения агрегата по загону необходимо выбирать с учетом ранее изложенных рекомендаций. Например, для уборочных агрегатов убранная часть загона должна находиться со стороны выгрузки урожая. Для движения перекрытием:
В данном случае чаще всего нет необходимости обрабатывать борозды и стыки, поэтому в выражениях (18.25) и (18.26) следует принять mд= 0 (в других случаях mд=1). Если при этом не обрабатываются поворотные полосы, то следует принять
Последующее решение, включая выбор рациональной ширины загона, выполняют аналогично предыдущему случаю. Для движения круговым способом:
В данном случае холостые повороты выполняют в середине загона. Кроме того, происходит потеря пути при рабочих поворотах агрегата (скрытый холостой ход). Равенства (18.28) и (18.29) справедливы как для движения МТА от периферии к центру, так и наоборот. Для сохранности микрофлоры почвы на обрабатываемом участке более предпочтительно движение агрегатов от центра к периферии. Однако для этого необходима предварительная подготовка поля, в частности для уборочных работ. Коэффициент β3 в отличие от выражения (18.21) следует принять равным 0,5. Необходимость в дополнительных заездах для обработки стыков может возникнуть при движении от периферии к центру, поэтому mд=2 при выезде с загона на сторону въезда и mд=1 при выезде в противоположную сторону.
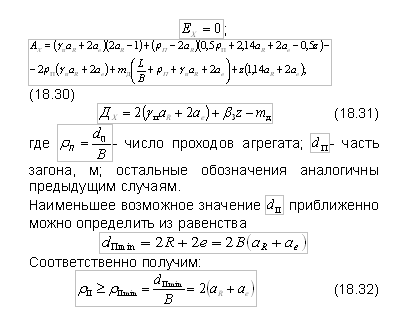
Для движения круговым способом типа «конверт»
В зависимости от направления движения МТА принять: β3=0,5 — переезд на соседний правый загон при движении агрегата от центра к периферии, и наоборот, на соседний левый загон при движении от периферии к центру; β3=1,5 — переезд на соседний левый загон при движении от центра к периферии, и наоборот, на соседний правый загон при движении от периферии к центру. Необходимость в дополнительных заездах и соответствующее значение mд= 0 следует определить по аналогии с предыдущими случаями. Размеры загона с учетом Ex=0 также определяют по аналогии с предыдущим случаем. На основании выражений (18.30), (18.31) и (18.32) можно рассчитать все необходимые показатели холостого хода МТА для данного способа движения.
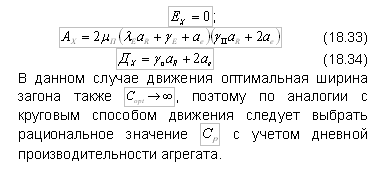
Если загон обрабатывают в двух взаимно перпендикулярных направлениях, то правую часть равенства (18.11) с учетом выражений (18.33), (18.34) следует удваивать. |

 , полученное по формуле (18.7), следует округлить в большую сторону до ближайшего четного числа. Четность или нечетность числа проходов МТА при обработке поворотной полосы зависит от направления выезда из поворотной полосы: если выезд агрегата после обработки поворотной полосы происходит в сторону заезда, то число проходов должно быть четным, и наоборот. При этом учитывают и расположение соседнего загона, на который должен переехать агрегат.
, полученное по формуле (18.7), следует округлить в большую сторону до ближайшего четного числа. Четность или нечетность числа проходов МТА при обработке поворотной полосы зависит от направления выезда из поворотной полосы: если выезд агрегата после обработки поворотной полосы происходит в сторону заезда, то число проходов должно быть четным, и наоборот. При этом учитывают и расположение соседнего загона, на который должен переехать агрегат.

 включает в себя следующие составляющие потерь времени смены: на разметку загона; настройку агрегата для первого прохода и последующую перестройку на основной режим работы; подготовку агрегата к переезду на соседний загон и др.
включает в себя следующие составляющие потерь времени смены: на разметку загона; настройку агрегата для первого прохода и последующую перестройку на основной режим работы; подготовку агрегата к переезду на соседний загон и др.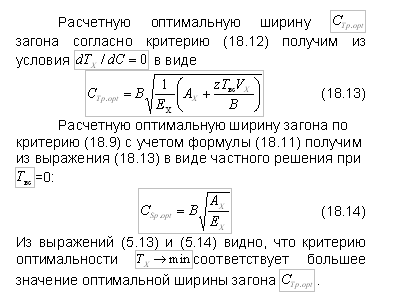

 получим минимальные потери времени смены, связанные с холостым ходом агрегата:
получим минимальные потери времени смены, связанные с холостым ходом агрегата: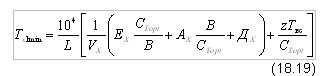
 =0 — без обработки поворотных полос.
=0 — без обработки поворотных полос.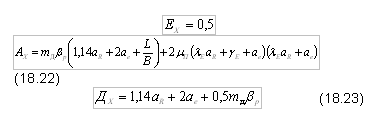

{kind=link}
{kind=link}
{kind=link}
