

|
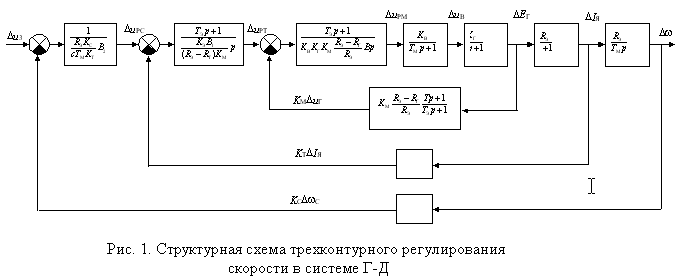
3.Основные положения Для того, чтобы регулировать скорость двигателя постоянного тока с неза-висимым возбуждением, используют различного вида управляемые преобразователи. До сравнительно недавнего времени для этой цели преимущественно применялись электромашинные преобразователи- генераторы постоянного тока, а основой регулируемого электропривода была система Г-Д. В настоящее время в связи с развитием полупроводниковых преобразователей ее применение сильно сократилось, однако она продолжает успешно применяться во многих ответственных промышленных установках. В связи с более сложной математической моделью генератора постоянного тока по сравнению с тиристорным преобразователем имеет определенный теоретический интерес исследование переходных процессов в системе регулиро-вания скорости с подчиненным принципом регулирования промежуточных координат. Питание обмотки возбуждения генератора можно осуществлять от реверсивного тиристорного преобразователя, либо от реверсивного транзисторного преобразователя, работающего на принципах широтно-импульсной модуляции. Далее будем рассматривать только систему Г-Д с регулируемым возбуждением двигателя. В зависимости от количества подлежащих ограничению координат системы Г-Д, а также от требований к диапазону регулирования скорости и жесткости механических характеристик двигателя можно выбрать различные структуры систем регулирования скорости двигателя. Наибольшее распространение получили следующие структуры систем регулирования: 1. Двухконтурная система регулирования частоты вращения двигателя, которая содержит два контура регулирования с соответствующими регуляторами. Контур регулирования тока якоря содержит пропорционально-интегрально-дифференционный (ПИД) регулятор тока, контур регулирования скорости содержит пропорциональный (П) регулятор скорости и апериодический фильтр на выходе тахогенератора для сглаживания пульсаций его напряжения. 2. Двухконтурная система регулирования частоты вращения, содержащая два регулятора и соответственно два контура регулирования. Контур регулирования тока якоря двигателя содержит ПИД-регулятор, контур регулирования напряжения на якоре двигателя имеет П-регулятор. Эта схема применяется при отсутствии жестких требований к диапазону регулирования и уровню поддержания частоты вращения. 3. Двухконтурная система регулирования частоты вращения двигателя, содержащая два контура регулирования и два регулятора. Контур регулятора тока якоря также содержит ПИД-регулятор тока, контур регулирования ЭДС двигателя содержит П-регулятор ЭДС и датчик ЭДС. Эта схема позволяет увеличить диапазон регулирования скорости и тестность механических характеристик по сравнению с предыдущей. 4. Трехконтурная система регулирования частоты вращения двигателя. В схеме контролируются три параметра: напряжение генератора, ток якоря двига-теля и частота вращения двигателя. Структурная схема трехконтурной системы приведена на рис. 1. Регулятор напряжения выполнен пропорционально-интегральным (ПИ) и компенсирует постоянную времени обмотки возбуждения генератора Твг. Постоянная времени, обусловленная контурами вихревых токов и рассеяния Твт, входит в величину суммарной некомпесируемой малой постоянной времени контура напряжения Т?. Регулятор тока представляет собой ПИ-регулятор и компенсирует электромагнитную постоянную времени Тэ якорной цепи системы Г-Д. Регулятор частоты вращения пропорциональный, он компенсирует влияние электромеханической постоянной времени Тм электропривода. В расчетной структурной схеме (рис. 1) системы отсутствует в сигнале об-ратной связи по напряжению составляющая, равная приращению ЭДС двигате-ля. При таком допущении расчетная схема упрощается без существенной потери точности расчета, так как ЭДС двигателя изменяется значительно медленнее, чем падение напряжения на якоре генератора. При этом допущении в контуре регулирования напряжения необходимо учесть влияние обобщенной постоянной времени
где Rяг — сопротивление якорной цепи генератора, Ом; Rэ = Rяд + Rяг — полное сопротивление якорной цепи в системе Г-Д, Ом; Rяд — сопротивление якорной цепи двигателя, Ом;
Lяд — индуктивность якорной цепи двигателя, Гн; Lяг — индуктивность якорной цепи генератора, Гн. При известных параметрах математических моделей двигателя, генератора, тиристорного возбудителя, датчиков обратной связи по напряжению, току и скорости параметры регуляторов можно определить следующим образом: Рассчитываем малую некомпенсируемую постоянную времени. для контура регулирования напряжения
где Тп — постоянная времени тиристорного возбудителя, с. Принимается равной 0,01 с для данного лабораторного стенда. Определяем параметры ПИ-регулятора напряжения, имеющего передаточную функцию
где Твг = Тв + Твт — постоянная времени обмотки возбуждения генератора;Твт — постоянная времени короткозамкнутого контура вихревых токов. Обычно на практике принимают Твт = 0,1Тв; Тин — постоянная времени интегрирования для контура напряжения определяется выражением
где Кв — коэффициент передачи тиристорного возбудителя; Кг — коэффициент передачи по напряжению генератора; Кн — коэффициент передачи датчика напряжения .Рассчитываем параметры ПИ-регулятора тока по формуле
где Тит — постоянная времени интегрирования контура тока, определяемая по выражению Коэффициент передачи П-регулятора скорости находится по формуле Параметры математической модели объекта регулирования и датчиков определяется по каталожным данным машин и на основе экспериментальных данных. Расчет передаточных функций регуляторов для всех контуров выполнен путем их оптимизации на технический оптимум (или модульный оптимум), поэтому переходные процессы в контурах близки к колебательным процессам при сравнительно небольшом перерегулировании. Однако контур регулирования скорости при этом не обладает астатизмом по отношению возмущающего воздействия (статического момента). Следовательно, механические характеристики двигателя в замкнутой системе имеют вид где
По этой причине ограничен максимально достижимый диапазон регулирования, исходя из требований по точности регулирования скорости двигателя. |
 — электромагнитная постоянная времени якорной цепи систем Г-Д, с;
— электромагнитная постоянная времени якорной цепи систем Г-Д, с;

 , Кт — коэффициент передачи датчика тока, Ом.
, Кт — коэффициент передачи датчика тока, Ом.
 где Кс — коэффициент передачи датчика скорости, В•с/рад; с. — постоянная ЭДС двигателя, В•с/рад.
где Кс — коэффициент передачи датчика скорости, В•с/рад; с. — постоянная ЭДС двигателя, В•с/рад.
 — статическое падение скорости в разомкнутой системе;
— статическое падение скорости в разомкнутой системе;
 — скорость идеального холостого хода двигателя в замкнутой системе.
— скорость идеального холостого хода двигателя в замкнутой системе.
