

Задание3.1Подключение датчика типа термосопротивлениеДатчики типа ТСМ50, ТСМ100 и др. имеют относительно неболь-шоесопротивление, сравнимое с сопротивлением соединительных проводов. Из-за этого вносится большая дополнительная погрешность. Обычноподключение таких термосопротивлений осуществляется по трехпроводной схеме, но используемый в работеОВЕН ПЛК150 неимеет такой возможности (датчики подключаются по двухпроводной схеме). Поэтому перед их использованием необходимо выполнить следующие действия: 1Подключить датчик к ПЛКпо двухпроводной схеме. 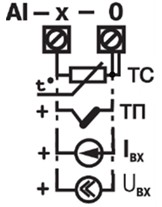
Рисунок 6 – Схема подключения датчиков к аналоговым входам ПЛК ТС-термосопротивление; ТП-термопара. 2 Создать новый проект в среде CoDeSys для ПЛК150. 3 Настроить контроллер на работу с датчиком требуемого типа. Для этого перейдем на вкладку структуры проекта Ресурсы >Конфигурация ПЛК и при помощи щелчка правой кнопкой мыши на элементе Unifiedsignalsensorукажем тип датчика RTDsensor (см. рис. 7.) Для датчика, используемого в работе, температурный коэффициент равен 4,28*10-31/°C, а номинальное сопротивление датчика – 50 Ом. Поэтому в Параметрах модуля для параметра Typeofsensor необходимо выбрать r428_50 (см. рис.8). 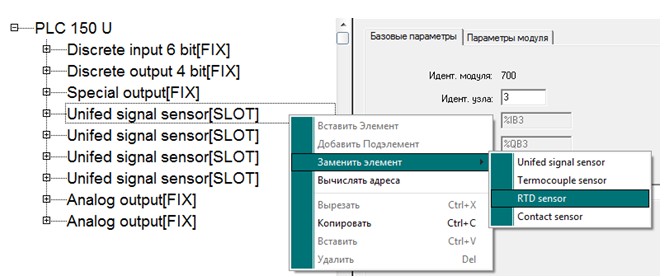
Рисунок 7 – Выбор типа сигнала для аналогового входа 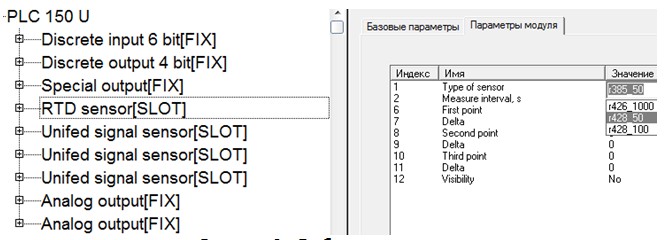
Рисунок 8 – Выбор типа датчика 4 Со стороны датчика к линии связи подключить магазин сопротивлений с классом точности не менее 0,1 или эталонный резистор. 5 Установить на магазине сопротивлений значение 50 Ом (для датчика ТСМ50). 6 Зафиксировать результаты измерения на аналоговом входе контроллера (Результаты измерения можно вызвать на вкладкеRTDSensor (параметр типа REAL) при установке курсора на канале модуля (см. рис. 9). 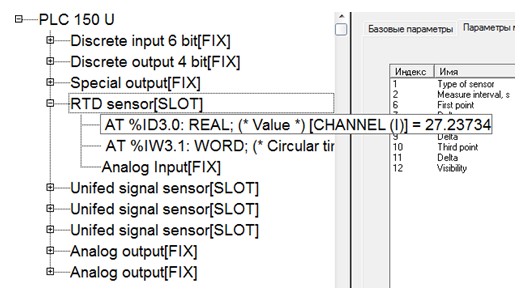
Рисунок 9 – Чтение значение сигнала датчика температуры 7 В параметре Firstpoint модуля аналогового входа задать значение 0 (что соответствует значению 0°С) и впервом параметреDelta задать значение, равное измеренному, но с обратным знаком. 8 Повторно зафиксировать результаты измерения на аналоговом входе контроллера и удостовериться, что они равны или близки к 0. 9 Подсоединить вместо магазина сопротивлений датчик. 3.2Подключение датчика температуры типа термопараКалибровка термопары (компенсация холодного спая) и аналоговых входов ПЛК процесс более сложный, чем калибровка термосопротивления и зависит от типа термопары (калибровочной характеристики), типа измерительного преобразователя, условий окружающей среды и др. Как правило, для калибровки термопар с таким сложным устройством как ПЛК поставляются специальные библиотеки для калибровки. Калибровку необходимо производить в условиях приближенных к условиям производственной среды (с установкой ПЛК в щит управления, а датчиков на предполагаемых точках измерения). Для наблюдения результатов измерения температуры при помощи датчика типа термопара произведем следующие действия: 1 Настроим контроллер на работу с датчиком требуемого типа. Для этого перейдем на вкладку структуры проекта Ресурсы >Конфигурация ПЛК и при помощи щелчка правой кнопкой мыши на элементе Unifiedsignalsensorукажем тип датчика Thermocouplesensor Датчик, подключенный к аналоговому входу ПЛК, обладает характеристикой типа L, поэтомув Параметрах модуля для параметра Typeofsensor необходимо установить пункт TP_L. 2 Зафиксировать результаты измерения на аналоговом входе контроллера (параметр типа REALпри установке курсора на канале модуля). 3.3. Подключение источника унифицированного сигналаИсточники унифицированного сигнала позволяют принимать по аналоговым входам ПЛК сигналы от различных датчиков, имеющих нормирующие преобразователи. Для подключения источника постоянного напряжения 0..10 В необходимо: 1 Перейти на вкладку структуры проекта Ресурсы >Конфигурация ПЛК и для элемента Unifiedsignalsensorв поле типа датчика (Typeofsensor) установить пункт U0_10. 2 Зафиксировать результаты измерения на аналоговом входе контроллера при изменении напряжения от источника (параметр типа REALпри установке курсора на канале модуля). 3.4 Регулирование частоты и скважности выходного сигнала по методу ШИМ3.4.1 Использование блока «генератор прямоугольных им-пульсов»Осуществить выдачу последовательности импульсов по методу ШИМ с регулированием длительности импульса и паузы в прямо пропорциональной зависимости от напряжения на аналоговом входе (уставки). Один из способов формирования импульсной ШИМ – последовательности - использование входящего в состав дополнительной библиотеки Utill.libблока BLINK.Для подключения библиотеки необходимо перейти на вкладку структуры проекта Ресурсы >Менеджер библиотек и из контекстного меню (см. рис. 10) добавить соответствующую библиотеку. 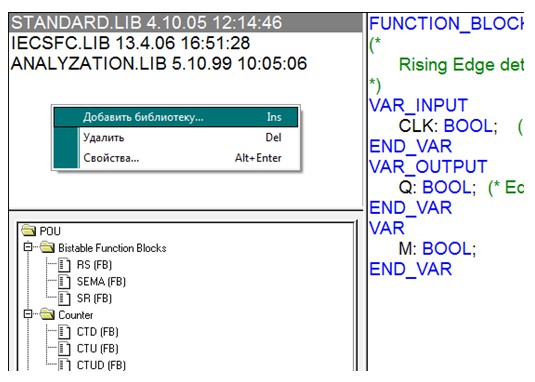
Рисунок 10 – Добавление новой библиотеки Для выполнения задания использовать следующие функциональные блоки (предварительно изучив принцип их работы, воспользовавшись справочной системой):BLINK, LIMIT, MUL, REAL_TO_TIME(см. рис. 11). 
Рисунок 11 – Функциональные блоки, используемые в программе 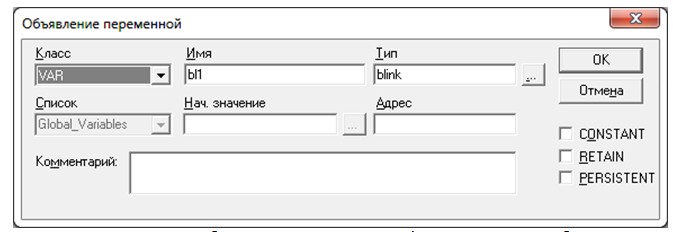
Рисунок 12 – Объявление экземпляра функционального блока Для добавления экземпляра блока, отличного от размещаемого по умолчанию блока AND необходимо изменить его название на соответствующее новому блоку либо нажать клавишу F2 (при установке курсора на название блока)и выбрать блок из списка доступных. Для каждого блока, не входящего в стандартную библиотеку необходимо задавать имя экземпляра латинскими символами и цифрами без пробелов (см.рис.12). При задании длительности импульсов необходимо помнить, что единицей измерения времени для формата TIME являются миллисекун-ды.Период следования импульсов ограничить в пределах от 1 до 3 с. 3.4.2 Использование встроенного в ПЛК модуля ШИММодуль ШИМ (Pulse-widemodulator или PWM) – программный мо-дуль, предназначенный для обеспечения функционирования генератора широтно-импульсной модуляции, подключенного к дискретному выходу. Модуль ШИМ является подчиненным подмодулем модуля дискретных выходов. Модуль имеет 16-ти битовый канал Value – (формат WORD), задающий значение скважности ШИМа. Изменяется от 0(0%) до 65535(100%) Параметры модуля: - «Номер выхода» (Numberofoutput) – от 0 до 7, - «Период ШИМ в 100 мксек» (Periodof PWM in 100 mksec) – от 100 до 360000, значение по умолчанию – 100. - «Минимальная длительность импульса ШИМ в 100 мксек» (Minimaldurationofimpulsein 100 mksec) – от 1 до 65000, значение по умолчанию – 30 = 100 мкс. Для добавления модуля PWM необходимо из контекстного меня модуля дискретных выходов (Discreteoutputs)выбрать пункт Добавить Pulse-widemodulator (см. рис. 13). 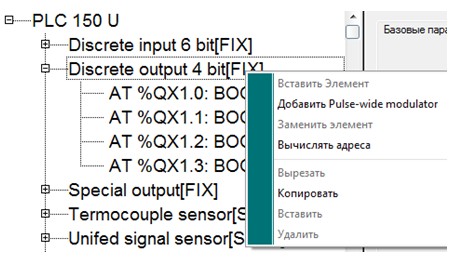
Рисунок 13 – Добавление модуля PWM Осуществить выдачу последовательности импульсов по методу ШИМ с регулированием скважности импульсов в прямо пропорциональной зависимости от напряжения на аналоговом входе (уставки). Период следования импульсов задать равным 1 с. Скважность импульсов регулировать в пределах от 0 до 65535. Для выполнения задания дополнительно воспользоваться блоком преобразования данных REAL_TO_WORD. |
