|
Основные положения
Для регулирования скорости вращения двигателя постоянного тока с независимым возбуждением необходимо изменять напряжение на якоре от нуля до номинального значения  . Это можно осуществить с помощью широтно-импульсного силового преобразователя с выходом на постоянном токе. Основным силовым элементом такого преобразователя является бесконтактный ключ, построенный, либо на запираемом по управляющему электроду тиристоре, либо на силовых биполярных транзисторах, либо на биполярных транзисторах с индуцированным затвором, представляющих собой комбинацию из транзисторов типа МДП и силовых биполярных транзисторов. Следует отметить, что силовые транзисторы работают в ключевом режиме, представляющем чередование режимов отсечки и насыщения. . Это можно осуществить с помощью широтно-импульсного силового преобразователя с выходом на постоянном токе. Основным силовым элементом такого преобразователя является бесконтактный ключ, построенный, либо на запираемом по управляющему электроду тиристоре, либо на силовых биполярных транзисторах, либо на биполярных транзисторах с индуцированным затвором, представляющих собой комбинацию из транзисторов типа МДП и силовых биполярных транзисторов. Следует отметить, что силовые транзисторы работают в ключевом режиме, представляющем чередование режимов отсечки и насыщения.
Силовые преобразователи с широтно-импульсной модуляцией и выходом на постоянном токе могут работать с пассивной нагрузкой (обмотки возбуждения электрических машин и электромагнитных механизмов, нагревательные элементы и т.п.), а также с активной нагрузкой, содержащей ЭДС (цепь якоря ДПТ и т.п.). Если в первом случае широтно-импульсный преобразователь (ШИП) может обладать односторонней проводимостью, то во втором случае, как правило, необходимо обеспечить двустороннюю проводимость силовой цепи (например, для обеспечения тормозных режимов ДПТ НВ).
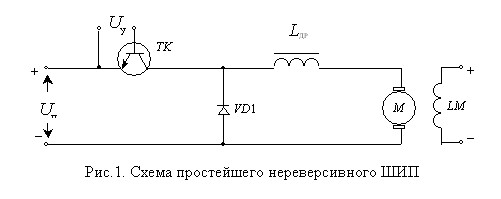
Простейшая схема ШИП с выходом на постоянном токе представлена на рис.1. Она содержит силовой полупроводниковый ключ  , периодически подключающий цепь якоря ДПТ НВ к источнику постоянного напряжения ШИП. Для снятия перенапряжений при отключении нагрузки от источника питания используется демпфирующий диод , периодически подключающий цепь якоря ДПТ НВ к источнику постоянного напряжения ШИП. Для снятия перенапряжений при отключении нагрузки от источника питания используется демпфирующий диод  . Для повышения индуктивности последовательно с якорем ДПТ НВ включен дополнительный дроссель . Для повышения индуктивности последовательно с якорем ДПТ НВ включен дополнительный дроссель  . .
При периодическом включении на интервале  ключа двигатель подключается к источнику с напряжением ключа двигатель подключается к источнику с напряжением  . Ток якоря . Ток якоря  на этом интервале возрастает по экспоненте с постоянной времени цепи якоря на этом интервале возрастает по экспоненте с постоянной времени цепи якоря  . .
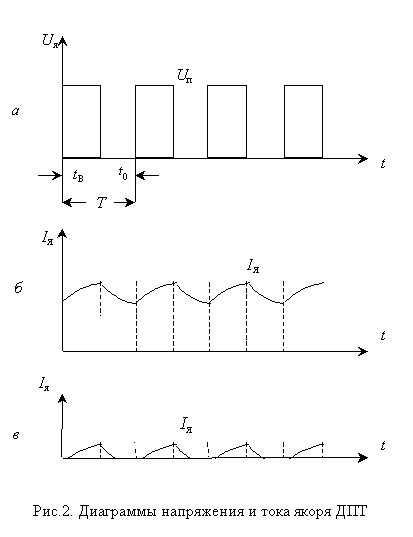
На интервале отключения  ключа ток якоря протекает через диод за счет возникающей ЭДС самоиндукции индуктивностей цепи якоря. Ток якоря на этом интервале уменьшается по экспоненциальному закону. На рис. 2 представлены диаграммы изменения напряжения на якоре двигателя и диаграммы тока для режимов непрерывного и прерываемого токов в установившемся состоянии. ключа ток якоря протекает через диод за счет возникающей ЭДС самоиндукции индуктивностей цепи якоря. Ток якоря на этом интервале уменьшается по экспоненциальному закону. На рис. 2 представлены диаграммы изменения напряжения на якоре двигателя и диаграммы тока для режимов непрерывного и прерываемого токов в установившемся состоянии.
К якорю двигателя в результате приложено импульсное напряжение, среднее значение которого может быть определено по формуле:  , ,
где  – период коммутации силового ключа, – период коммутации силового ключа,  – скважность импульсов напряжения. – скважность импульсов напряжения.
Нетрудно видеть, что напряжение на якоре двигателя, а, следовательно, и скорость его вращения могут регулироваться изменением скважности импульсов напряжения . В свою очередь изменение ? может быть получено одним их трех способов:
1. методом широтно-импульсной модуляции с постоянной частотой импульсов  за счет изменения продолжительности включения ; за счет изменения продолжительности включения ;
2. методом частотно-импульсной модуляции с постоянным временем включения при регулировании частоты импульсов 
3. методом широтно-частотной импульсной модуляции при изменении как частоты импульсов напряжения, так и продолжительности
Наибольшее распространение в электроприводах постоянного тока получила широтно-импульсная модуляция.
Как видно из приведенных на рис. 2 диаграмм одновременно с напряжением и ток якоря ДПТ НВ характеризуется колебаниями вокруг некоторого среднего значения. Соответственно крутящий момент и скорость вращения якоря также будут иметь пульсации.
Для режима непрерывного тока (рис. 2, б) можно записать следующие дифференциальные уравнения, характеризующие электромагнитные процессы в ДПТ при питании цепи якоря от ШИП:
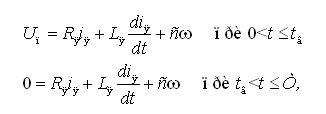
где  — сопротивление якорной цепи, Ом; Lя — индуктивность якорной цепи, равная — сопротивление якорной цепи, Ом; Lя — индуктивность якорной цепи, равная  , Гн; , Гн;  — индуктивность якоря двигателя, Гн; — индуктивность дросселя в цепи якоря, Гн; — индуктивность якоря двигателя, Гн; — индуктивность дросселя в цепи якоря, Гн;  — коэффициент двигателя, — коэффициент двигателя,  — угловая скорость двигателя, рад/с; — ток якорной цепи, А. — угловая скорость двигателя, рад/с; — ток якорной цепи, А.
В установившемся состоянии ток якоря минимален в момент, когда ТК включается, и максимален, когда ТК выключается. Решая совместно записанные уравнения с указанными начальными условиями, найдем выражения для минимального и максимального значений тока якоря для заданного значения :
Анализ полученных выражений показывает, что для уменьшения разницы между  необходимо уменьшать , т.е. увеличивать частоту коммутации силового ключа. Однако в этом случае повышаются потери на транзисторном ключе, что приводит к необходимости применения охлаждающих радиаторов большого размера. На практике частота коммутации колеблется в пределах от 1 до 10 кГц. необходимо уменьшать , т.е. увеличивать частоту коммутации силового ключа. Однако в этом случае повышаются потери на транзисторном ключе, что приводит к необходимости применения охлаждающих радиаторов большого размера. На практике частота коммутации колеблется в пределах от 1 до 10 кГц.
При выборе столь большой частоты коммутации колебания угловой скорости незначительны из-за фильтрующего влияния момента инерции на валу двигателя. Уравнение механической характеристики двигателя имеет вид:
где  – момент на валу двигателя, Н•м. – момент на валу двигателя, Н•м.
При уменьшении момента сопротивления на валу двигателя и малых значениях индуктивности якорной цепи мгновенные значения тока якоря могут достигать нулевого значения. Форма тока якоря двигателя при этом имеет вид, представленный на рис. 2, в, т.е. носит прерывистый характер.
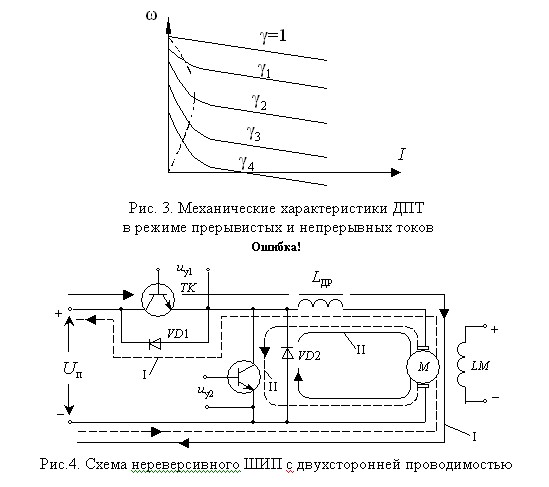
В случае прерывистых токов якоря механические характеристики двигателя приобретают нелинейный характер и имеют пониженную жесткость (рис. 3).
Если возникает необходимость обеспечить двухсторонний обмен энергией между источником питания и нагрузкой при нереверсивном выходе преобразователя, то применяется обратный каскад. Свойства обратимого каскада рассмотрим на примере нереверсивной схемы управления ДПТ НВ, в которой возможны как двигательный, так и тормозной режим (рис. 4). В рассматриваемой схеме последовательный силовой ключ  и параллельный ключ и параллельный ключ  переключаются в противофазе, т.е. при включении ключа ключ выключается и наоборот. переключаются в противофазе, т.е. при включении ключа ключ выключается и наоборот.
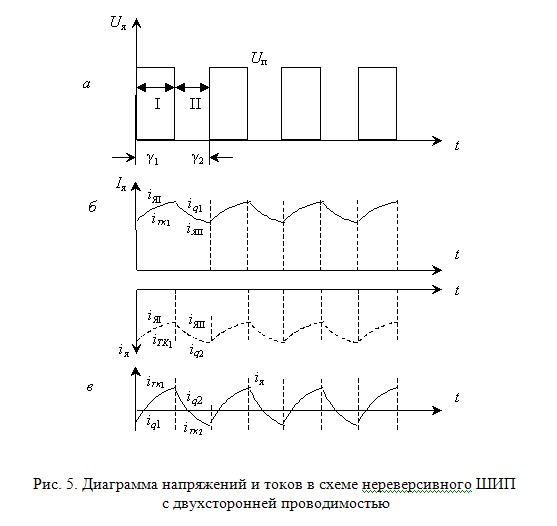
На рис. 5 представлены диаграммы напряжений и токов для рассматриваемой схемы ШИП. Если при определенной скважности  включения ключа , выходное напряжение ШИП равно включения ключа , выходное напряжение ШИП равно  , а скорость двигателя такова, что ЭДС якоря меньше , то от источника питания потребляется мощность, и путь тока якоря соответствует показанному сплошными линиями на рис. 4 для интервала I, когда включен ключ , и для интервала II, когда включен ключ , а скорость двигателя такова, что ЭДС якоря меньше , то от источника питания потребляется мощность, и путь тока якоря соответствует показанному сплошными линиями на рис. 4 для интервала I, когда включен ключ , и для интервала II, когда включен ключ
В режиме потребления тока от источника питания работают ключ и диод 
Если при той же величине скорость двигателя изменится и ЭДС двигателя станет выше среднего значения напряжения ШИП  то направление тока в цепи якоря изменится, причем на интервале II, когда включен под влиянием ЭДС якоря протекает ток и в индуктивности якоря накапливается электромагнитная энергия, которая на последующем интервале I диодом переводится в источник питания (пунктирные линии на рис. 4). В режиме рекуперации энергии в источник питания отводят энергию ключ ТК2 и диод VD1. В данной схеме возможен также режим переменных токов якоря, когда . Характер изменения токов для этого случая показан на рис. 5 в в увеличенном масштабе с обозначением рабочих интервалов силовых элементов схемы. то направление тока в цепи якоря изменится, причем на интервале II, когда включен под влиянием ЭДС якоря протекает ток и в индуктивности якоря накапливается электромагнитная энергия, которая на последующем интервале I диодом переводится в источник питания (пунктирные линии на рис. 4). В режиме рекуперации энергии в источник питания отводят энергию ключ ТК2 и диод VD1. В данной схеме возможен также режим переменных токов якоря, когда . Характер изменения токов для этого случая показан на рис. 5 в в увеличенном масштабе с обозначением рабочих интервалов силовых элементов схемы.
Для повышения жесткости механических характеристик двигателя, питаемого по цепи якоря от ШИП, а также для увеличения диапазона регулирования скорости вращения используется система автоматического регулирования скорости. Для обеспечения требуемого качества регулирования используется корректирующее устройство, выполненное в виде пропорционально-интегрального регулятора.
|
|


